■初めに
みちびき衛星CLAS・GPS自動草刈り機の開発が、ほぼ完了した。ここで搭載したCLAS・GPSが想像以上に良かったので、この開発資産を使って、もう一機種開発を進めることとした。
長らくRTK・GPSを使って来たが、電子基準点が必要なことと、基準点データを受信するために、インターネット接続が必要となり、それなりのランニング・コストがかかる。一方、CLAS・GPSでは、電子基準点データに相当する補強データは、みちびき衛星から降って来るので、この部分のランニング・コストはゼロである。測位精度が公称±10cmと言われていて、RTK・GPSの±5cmより落ちるが、自動草刈り機を実際に運用した実績からは、ほとんど遜色が無いと感じる。
また、みちびき衛星は、日本独自の技術で運用されており、これは相当高い優位性を持っていると思う。後は、これをどう有効に活用出来るかだと思うので、この辺を模索してみたい。
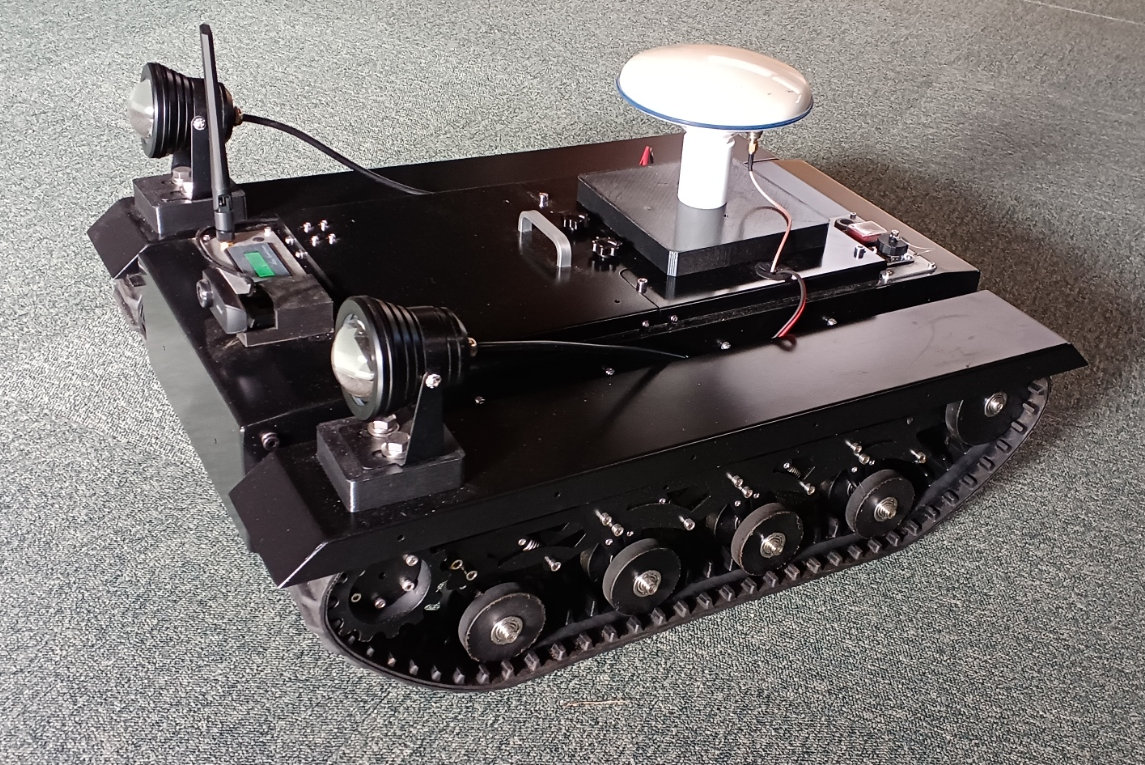
■主な仕様
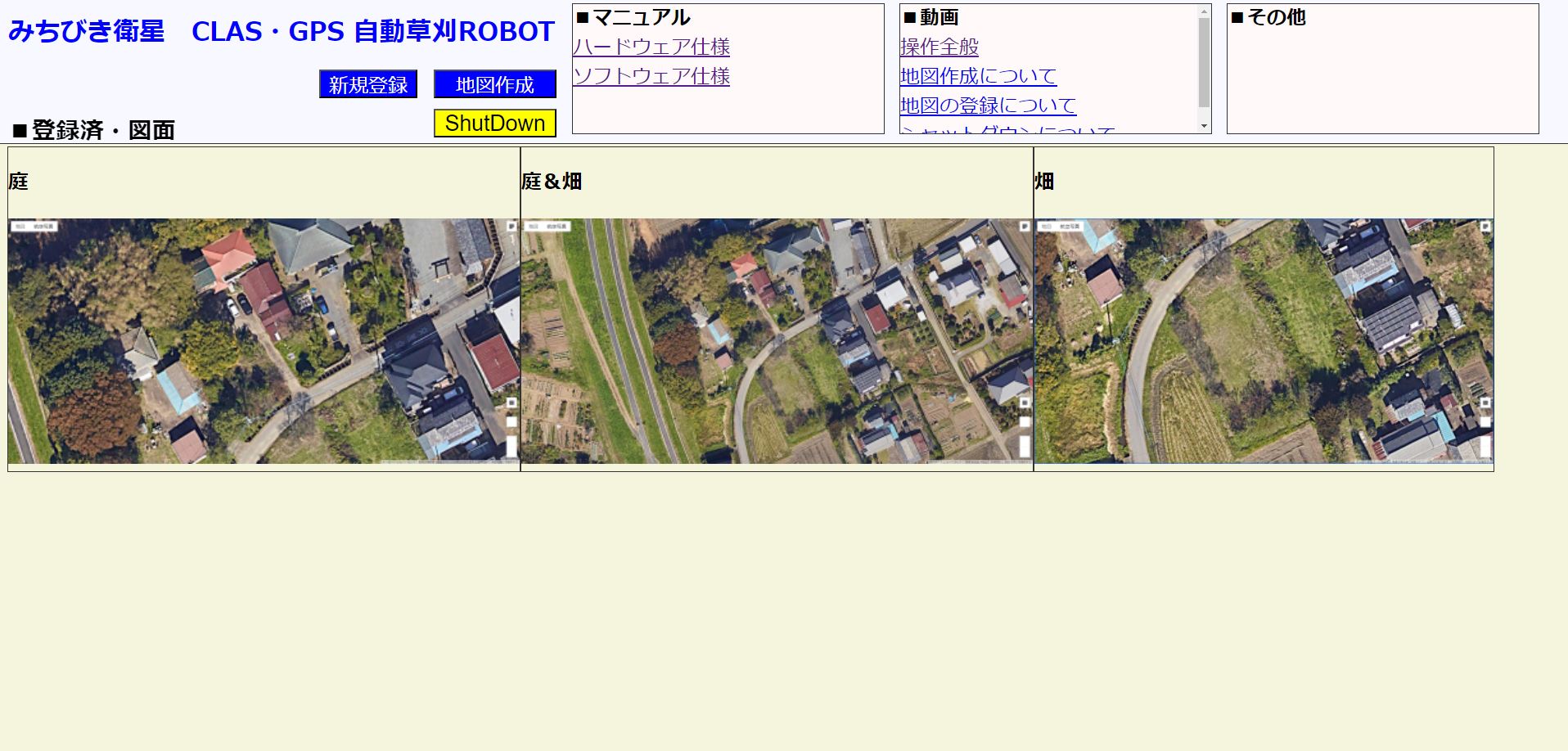
既に開発途上で、この記事を掲載開始時点で70%程の完成度である。既開発の自動草刈り機の用途は、草刈り・芝刈りに特化されているが、このTankROBO5はCLAS・GPS誘導の自動走行プラットフォームとし、そこからのカスタマイズで様々な用途展開を可能とする予定である。更に大型の、最大積載量100Kgの車体も存在する。
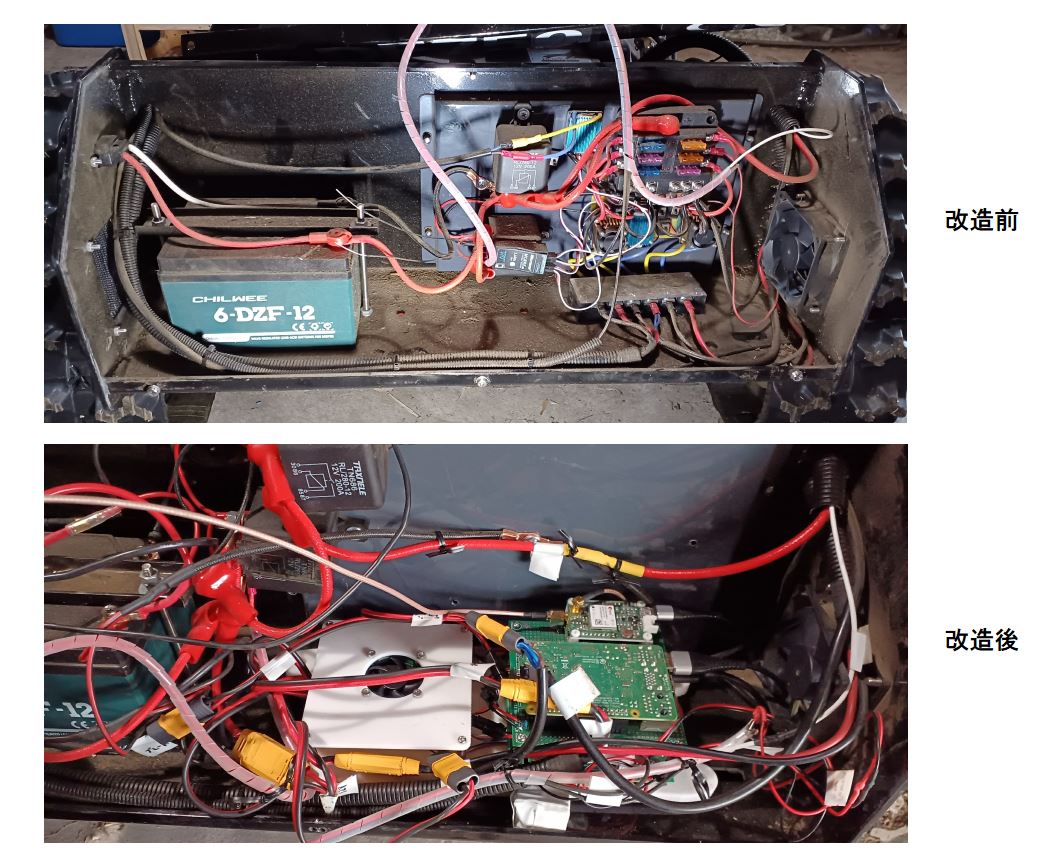
TankROBO5は、同じ車体を使った1~4号機(慣性誘導機種)は受託開発で完成・納入済みなので、5号機としている。
主な仕様は、以下の通り
・モーター ブラシレス・24V300W×2
・電池 リチウムイオン・29.4V40Ah
・車体重量 22Kg(電池除く)
・スピード 0~3.6Km/h
・最大積載量 50Kg
・登坂能力 40°
・走行精度 ±10cm(入力した走行パターンに対して)
・システム・マイコン Raspberry Pi4
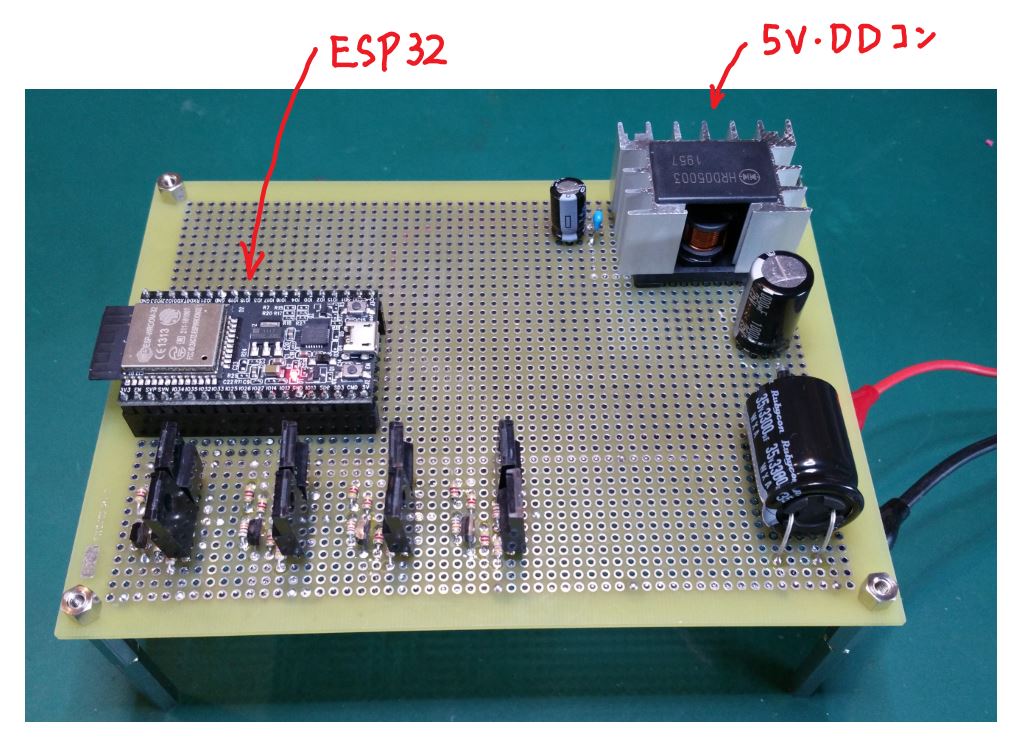
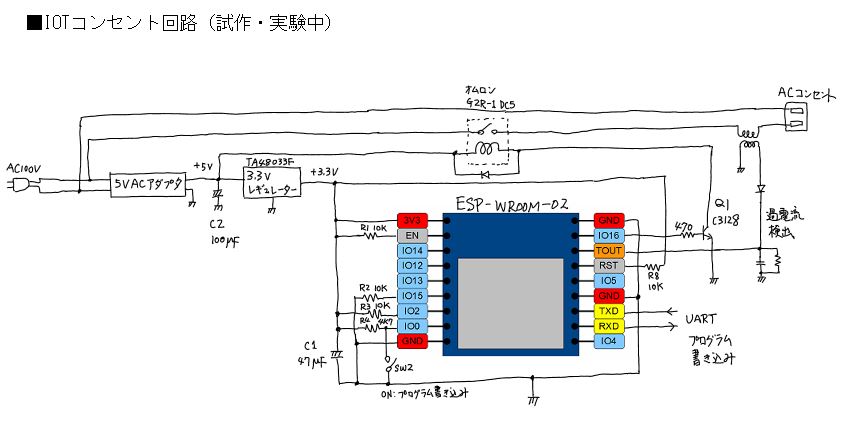
・モーター・マイコン ESP32
・CLAS・GPS受信機(NEO-D9C,ZED-F9P)
・GPSアンテナ GN-GGB0710
・モニター・カメラ(USBカメラ・120万画素)
・ヘッドライト LED・10W×2
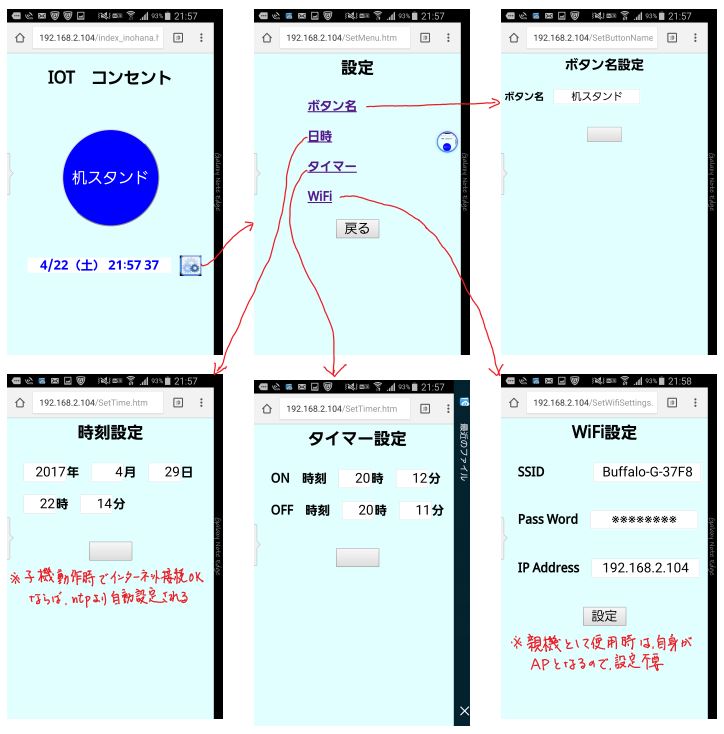
・遠隔操縦・バリエーション
LAN WiFi WiFi・中継器を使えば、広い範囲で使える ※今回製作中
WiFi AP ROBOTがAP(アクセスポイント)となり、LANの無い環境で使える
3G/LTE インターネット経由・国内どこでも、遠隔操縦可能
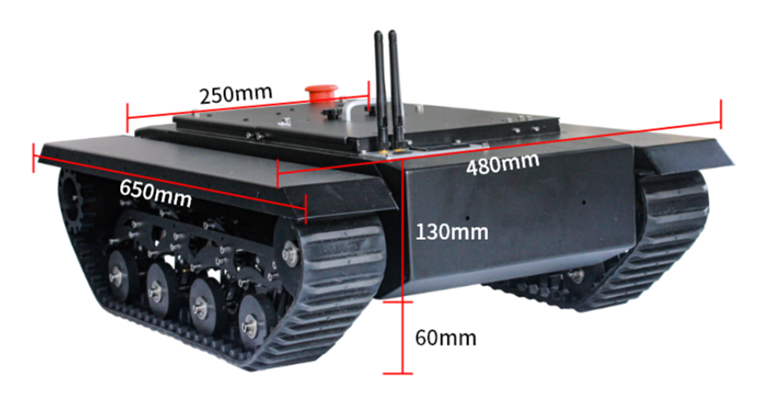
・サイズ
・カスタマイズ・展開事例(案)
鳥獣対策
液肥・消毒・除草剤散布
夜間巡回監視
複数・指定コース・荷物運搬
・
・
等
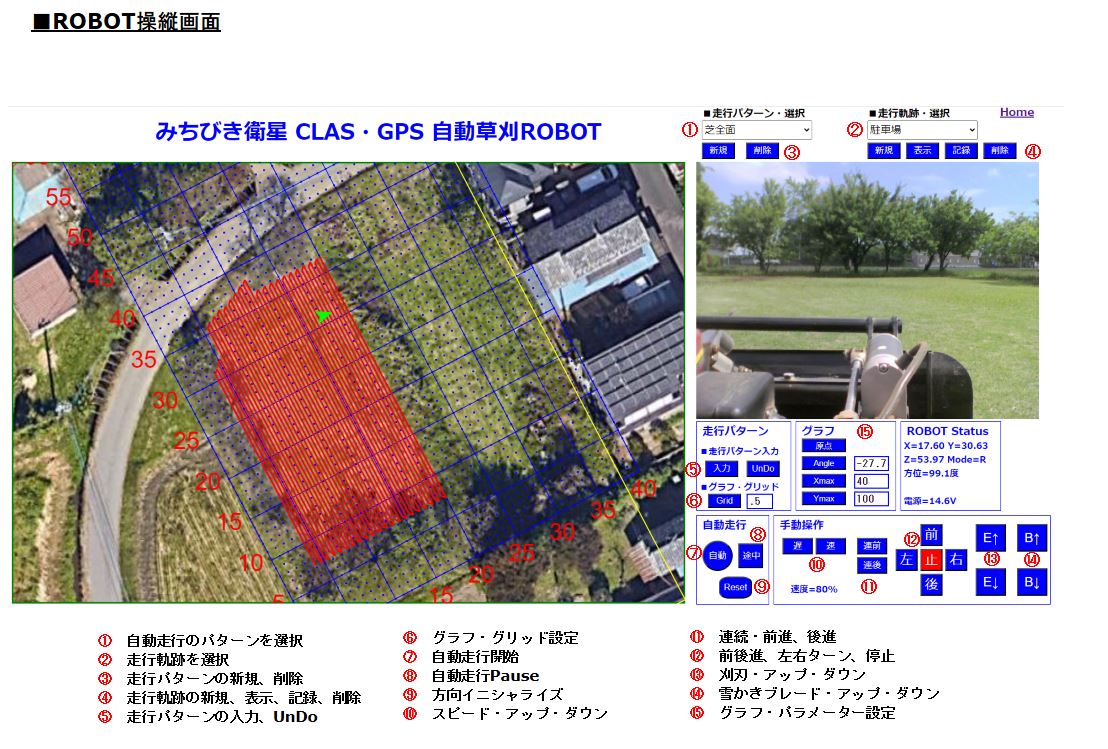
■走行パターンの自動生成
TankROBO5に何か仕事をさせる場合(肥料や除草剤の散布等)、所定のエリアを行ったり来たりの走行をすることになる。この走行パターンを手入力するのは、広大なエリアでは多大な手間がかかり、現実的では無いので、自動生成の機能は必須と思われる。
その機能を組込んだので、以下の動画参照(自動草刈り機にも移植予定)。
■夜間走行(鳥獣対策を想定)
TankROBO5の応用案として、鳥獣対策を上げていたので、それを想定して、夜間自動走行をやってみました。GPS走行制御なので昼夜には関係無く、高精度の自動走行が可能です。
追い払う効果を上げるためには、獣が驚くような音(猟銃発砲音、獣も驚く猛獣の鳴き声 等)を出すことも可能です。
バッテリーは大容量なので、1回の充電で、20~30Kmは走れると思います(計測してみます)。
■カスタマイズ開発について
TankROBO5は、基本的な自動走行系を組込んだ機種です。様々な用途向けには、用途に応じたカスタマイズ開発が必要となると思います。
ここから、お問い合わせ下さい。


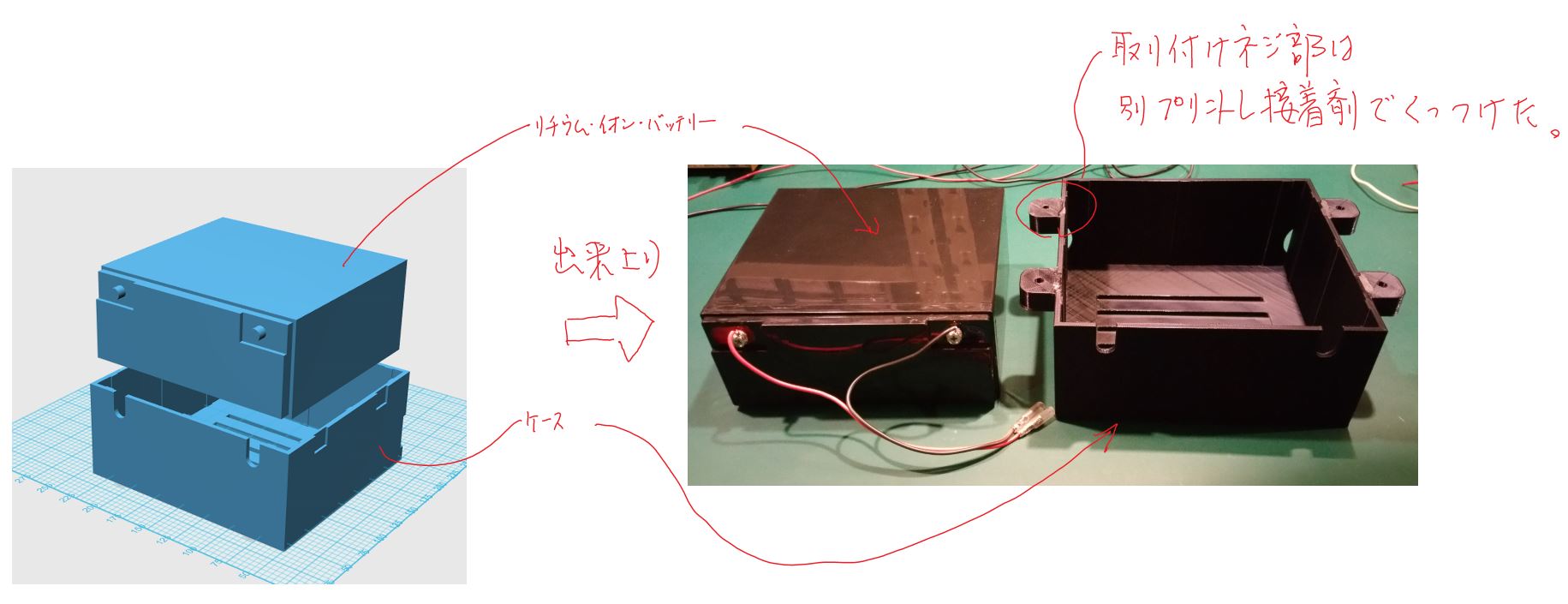
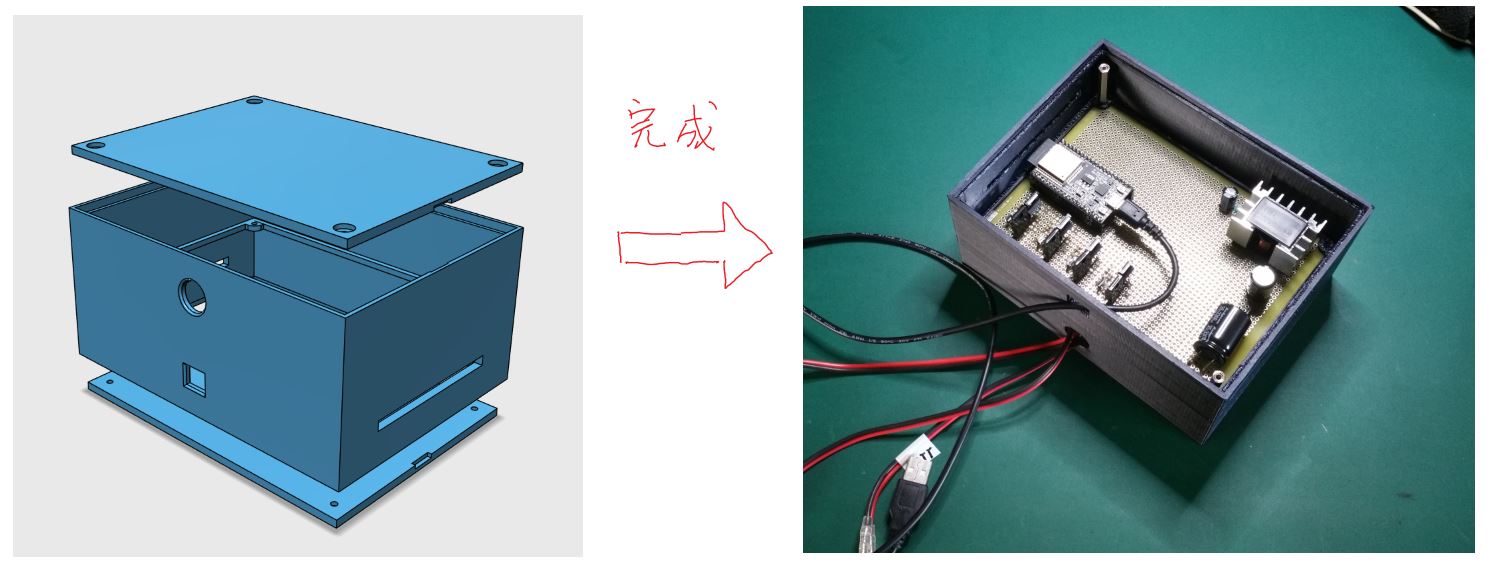





 因みに3Dデータは、無料の AUTODESK 123D DESIGNで設計した。3Dプリンターは、L-DEVO、フィラメント材はH-PLAである。印刷時間は8時間、使用材料代は72gで¥360程である。組み上げて、多少紆余曲折はあったものの、ほぼほぼ期待の動作をしている。
因みに3Dデータは、無料の AUTODESK 123D DESIGNで設計した。3Dプリンターは、L-DEVO、フィラメント材はH-PLAである。印刷時間は8時間、使用材料代は72gで¥360程である。組み上げて、多少紆余曲折はあったものの、ほぼほぼ期待の動作をしている。