■2016/10/12(水)
これが、ロボット2号機です。1号機が小さ過ぎて、ぎゅうぎゅう詰めになってしまったので大型の2号機を作成途上です。ベースとなる走行系はほぼ完成しました。走破性能を向上させるために、クローラ仕様としました。まだ、道具は持たせていません。
悪路・障害物・走行性能は抜群です。
■主な仕様
・バッテリー リチウムイオン 12V×2
・スマホ Android2.3(中古):操縦のWiFi通信→ioio-OTG、動画転送
・サイズ 1000mm × 900mm
■2016/10/17(月)
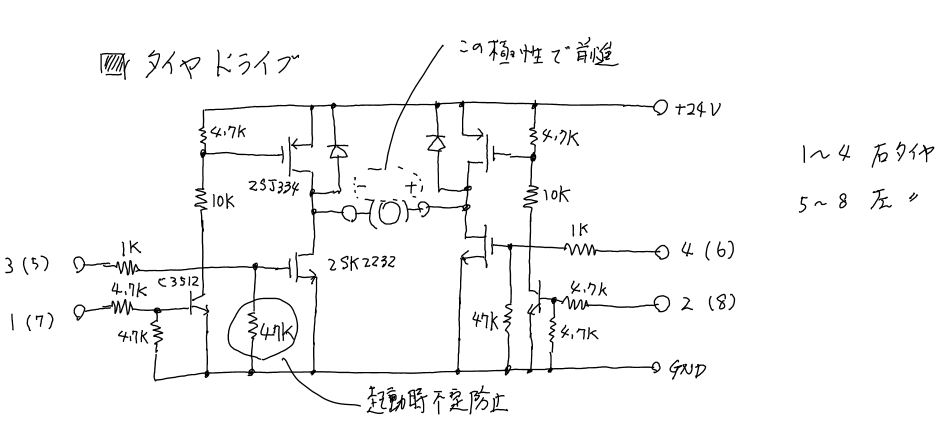
これが、クローラのモーターをドライブする電子回路です。1~4、5~8はこの電子回路をコントロールするioio-OTGのPIN番号(IOポート)です。
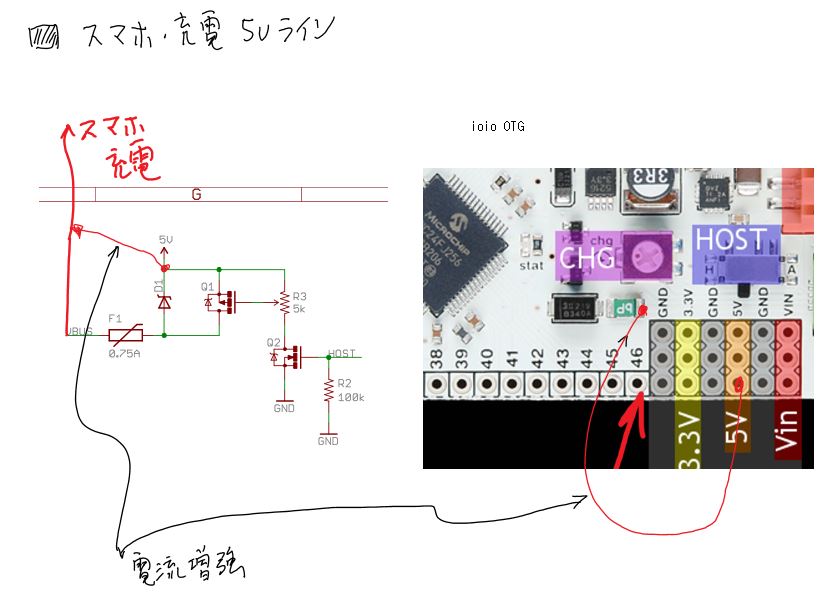
スマホとioio-OTGがUSBで接続され、電子回路をIOポートを介して制御しますが、その際スマホへの充電がioioから行われます。上の回路で、R3によって充電電流が調整されるようになっていますが、スマホに動画転送させると、電流消費が大きく充電電流が不足します。なので、可能な限り大きな電流を得る為、暫定的に電流増強措置をしています(恒久的には、馬力ある5V・DC-DCコンバータで供給すべきです)。
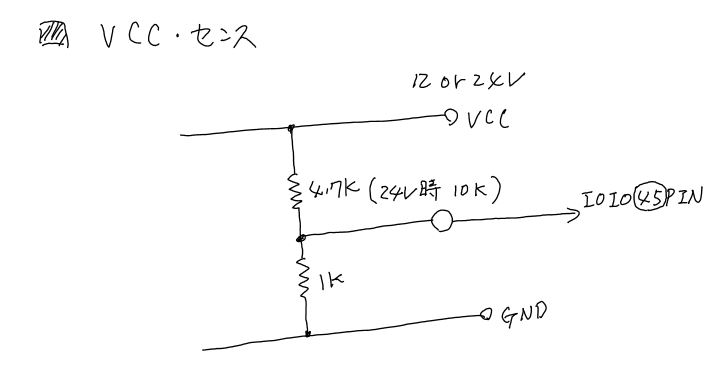
VCCセンスは、ロボットを遠隔操縦する為、バッテリーの電圧を監視する必要があるので、設置してます。ioioの45PINでA/D変換しWiFi(udp)で自宅PC(操縦用)へ送信します。
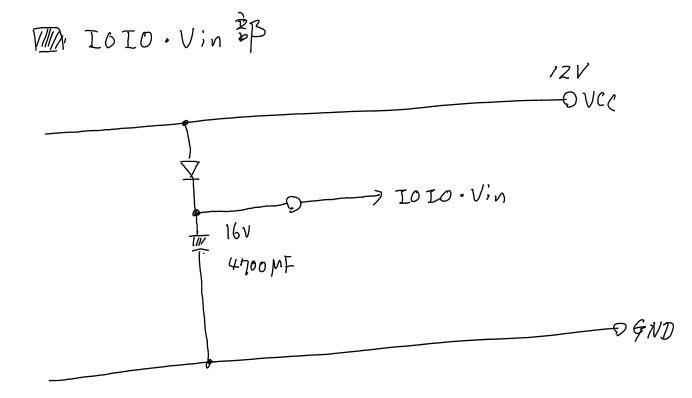
ioio Vin部は、瞬間的にモーターその他が大電流を流し、バッテリーの電圧が瞬断した時でも、ioioが誤動作しないようにするための瞬断対策回路です。
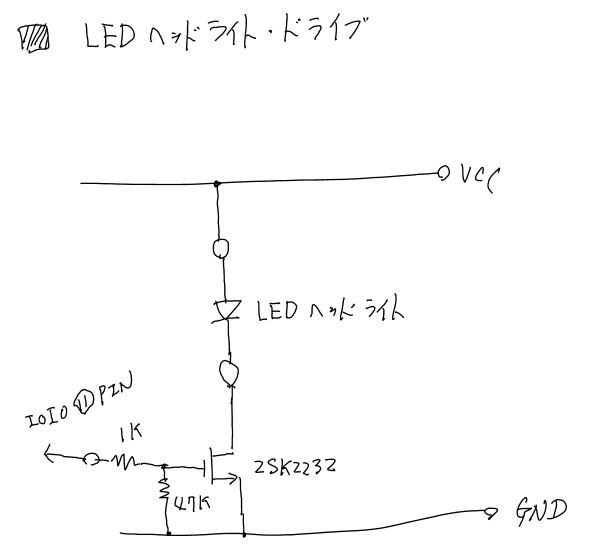
LEDヘッドライトのドライブ回路です。単純に、パワーMOSFETでON/OFFするだけです。
■スマホ・jAVAプログラム
長いので、あれこれ解説するのは止めます。ioio-OTGは自由度の高い良いI/Oボードだと思いますが、ESP-WROOM-02(ESP-8266)でやった方が、簡単ですね。別の機会に紹介します。
■2017/07/14(土)
★福島へ
・ロボット2号機(キャタピラ1号機)は、見染められて福島方面へ嫁いで行きました。嬉しくもあり、寂しくもあり、、、。
現場で、いい働きをしてくれることを願っています。
・材料を集めて、3号機をつくらねば、、、
■2017/07/16(日)
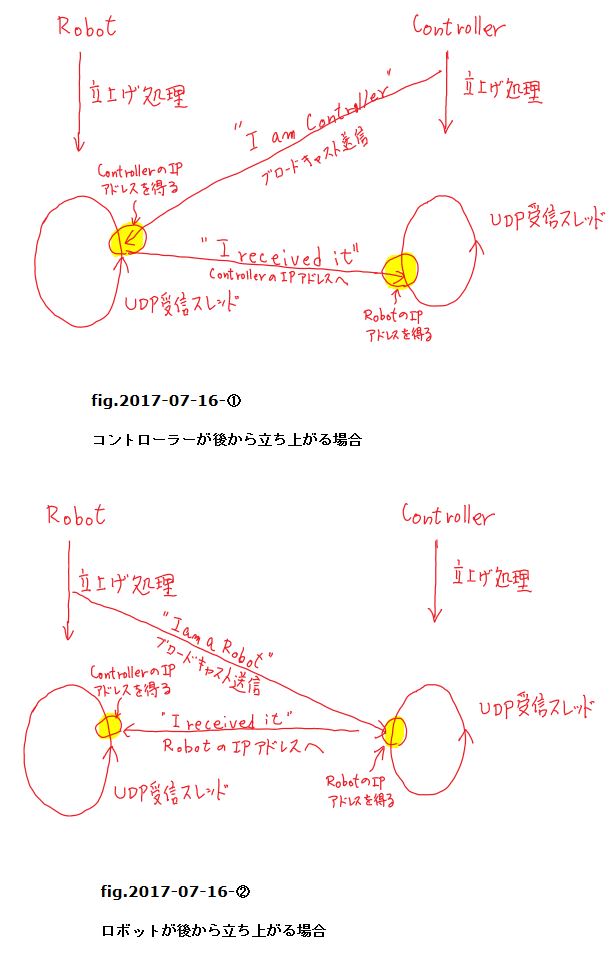
★UDPによるIPアドレスの伝達
ロボット2号機は、自宅のWiFi環境ではRobotもControllerも固定IPアドレスで、プログラムの中に書き込んで動作させていたが、嫁ぐことになって、嫁ぎ先でもちゃんと仕事ができるようにしなければならなくなった。そこで、UDPのブロードキャスト送信
(IPアドレス 255.255.255.255へ)でお互いのアドレスを知らせ合うように修正した。
イメージ図は以下で、立上げが、どちらが先でも後でもIPアドレスを交換できるように修正した。
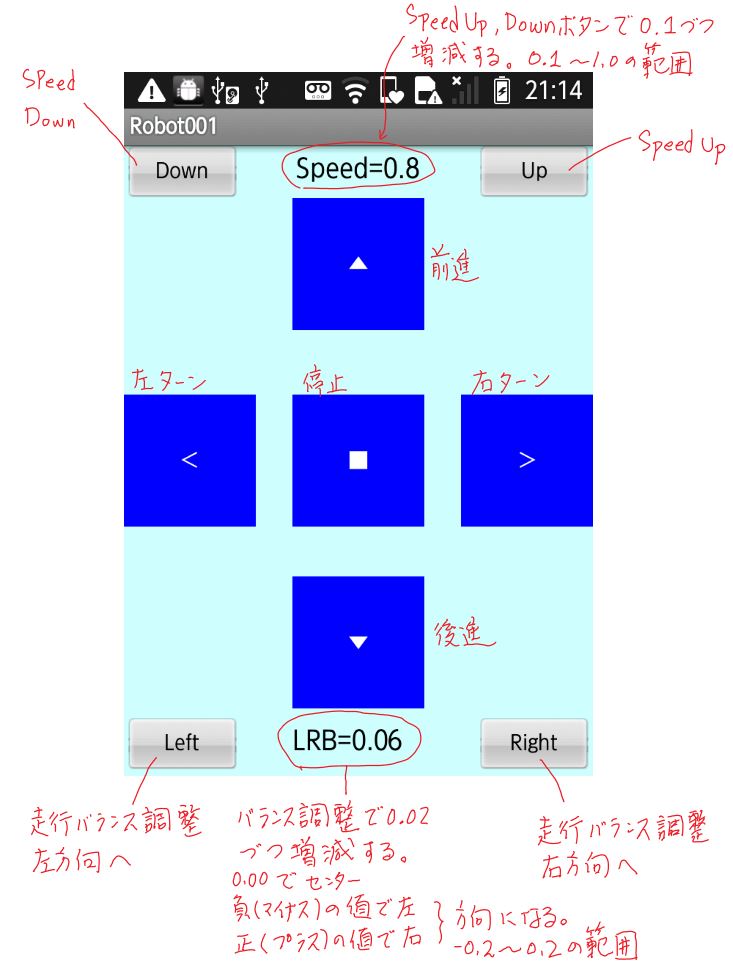
★スマホによるRobotコントローラ
スマホのRobotコントローラーを作成した。
従来VB.NETでつくったアプリで屋内からカメラ動画を見ながらPCで操縦していたが、屋外でRobotを目視しながら操縦したいというニーズに応えて作成した。ノートPCやタブレットPCを持ち出すよりも、お手軽である。また、これと同時に並行して屋内からPCで操縦も可能である。上で解説した、IPアドレスの交換のしくみを内蔵させている。
Speedコントロールは、PWMによって、モーターへ供給する電力を調整している。LRバランスは、左右のモーターやタイヤ径のアンバランスによって、直進性が損なわれるのを微調整する為の機能である。これも、PWMによって左右のモーターへの供給電力をそれぞれ別々に制御することによって実現している。
■2017/07/30(日)
★福島原発へ
明日、ロボット2号機の嫁ぎ先へ様子を見に行くことになった。ちゃんと、現場で使い物になっているかどうか、確認する。手ぶらで行って も何なんで、スマホ・Robotコントローラーを手土産に持って行くことにした。元々の設計思想は、ロボットに装着されたスマホから送られ てくるカメラ動画を見ながら、PCで遠隔操縦すること、になっていたが、現場の要望ではロボットを目視しながら操縦するので、ノートPCよ りスマホの方が、お手軽である。
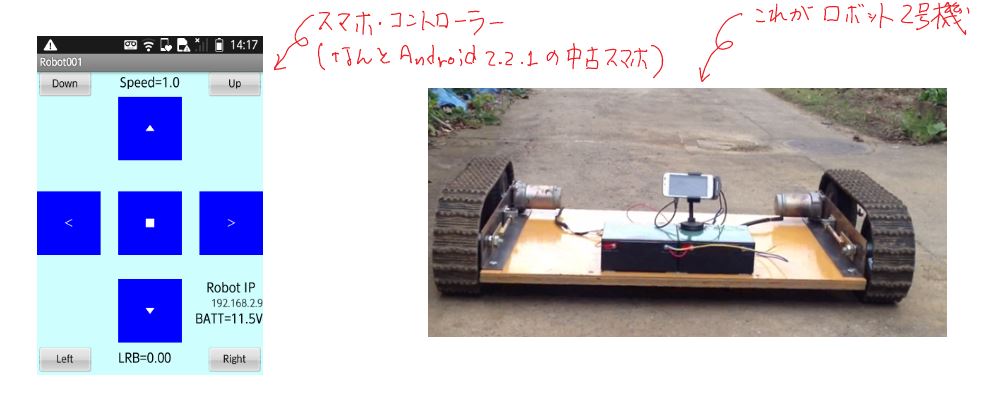 こんな操作画面である。
こんな操作画面である。
また、現場での走行テストでWiFiの電波範囲を越えた時、操縦不能のまま走行し続けてしまう(当然そうなる)、不都合の連絡があったので電 波が途切れて、コントローラーからの操縦指令が届かなくなったら、ロボット自身が自動停止するようにした(ウォッチドッグもどき)。ロ ボットのバッテリー電圧の監視機能も追加した。 これで、便利に使えるかどうかは、現場に行ってみないと解からない。やはり、現場が大事だ。工具とノートPC(eclipse,VisualStudio)を持って 行き電子回路基板とソフトの変更が出来る準備はした。
妙に、、、ワクワク感がある。
■サイト内リンク
ホソイ says:
ありがとうございます!
inohana says:
ホソイさん
コメントありがとうございます。
aliexpressのこれです。
参考になれば、幸いです。
ホソイ says:
こんにちは
通りすがりで申し訳ないのですが、このクローラは何をお使いでしょうか。
よろしければご教授頂けたら幸いです。