■初めに
最近プロポで操縦可能な、草(芝)刈り機が、国産・中国産で市販されている。YouTubeでも動画を見かけるようになったので、中国製・車体を入手して、GPS誘導による自動草刈り機を2次開発することにした。従来はRTK・GPSでやっていたが、新しい技術を取り入れ、みちびき衛星CLAS・GPSでやってみることにした。
RTK・GPSでは電子基準点のデータを受信するために、インターネット接続(有料・通信ドングル)が必要で、また電子基準点を自前で設置するか、データ提供サービスをやっている業者(有料・docomo、SoftBank、日本GPSデータサービス等)との契約が必要となる。しかし、CLASであれば補強信号はみちびき衛星から降ってくるので、運用コストを大幅に低減でき(ガソリン代だけ)、測位精度もRTK(±5cm)よりやや落ちる(±10cm)が、自動草刈り機、その他の農業機械等の用途には充分と思われる。
このような理由で、みちびき衛星 CLAS・GPS 自動草刈り機の制作を始めることにした。ここに、順次詳細を掲載して行くことにしたい。
■主な仕様
・エンジン 196cc・9馬力 4ストローク
・重量 約200Kg
・刈幅 550mm
・スピード 0~3Km/h
・登坂能力 45°
・雪かきブレード
・走行精度 ±10cm(入力した走行パターンに対して)
・システム・マイコン Raspberry Pi4
・モーター・マイコン ESP32
・CLAS・GPS受信機(NEO-D9C,ZED-F9P)
・GPSアンテナ GN-GGB0710
・モニター・カメラ(USBカメラ・120万画素)
■改造前・後
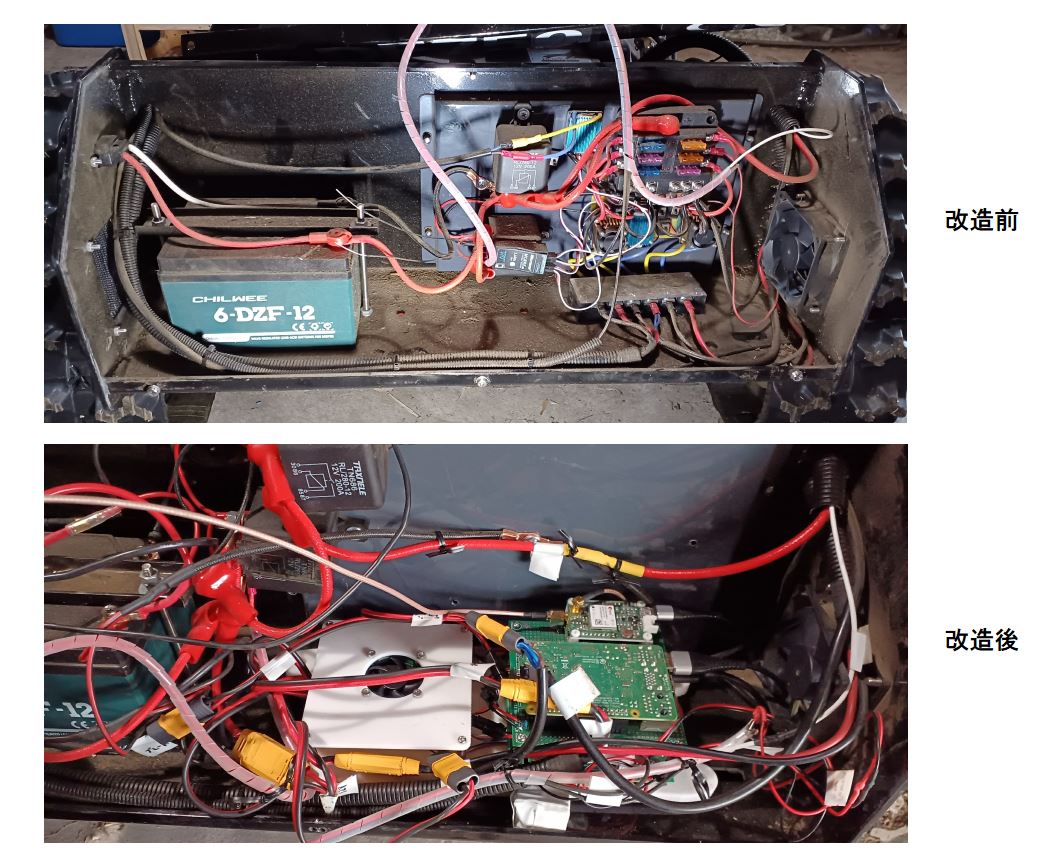
これが、改造前・後の制御電子回路だが、改造前は新品にも関わらず、ほこりだらけで、マイコンなどと言う高級なものは搭載されていない。しいて言えば、しょぼいプロポの受信機のユニットが、受信機とマイコンもどきが1つになったチップがあるだけである。
それ以外は、モーター・ドライバーが4つ(左右のキャタピラのスプロケット駆動用と、刈刃上下駆動、雪かきブレード上下駆動用)搭載されているだけである。それ以外は大電流ON/OFFのリレーが2つと、ヒューズ類で全てである。
電子回路と呼ぶには、程遠い。逆に言えば、よくこんなもので、らしい動作を実現しているのが凄いと言える。
プロポは、アナログ式サーボとなっていて、パルス幅(1500usセンター・ニュートラル)でモーターの正転反転と、PWM(1Khzなので、ピーピー耳障り)によるスピード制御を行っている。
改造後は、これらを全て取り去り(パワーリレー、200Aクラスは、そのまま流用)
Raspberry Pi4 python,apache2(javascript+html),php
ESP32 c++
PWM(20Khz)モーター・ドライバーを4Ch分
CLAS・GPS受信機(NEO-D9C,ZED-F9P)
GPSアンテナ GN-GGB0710
モニター・カメラ(USBカメラ・120万画素)
に置き換えた。
改造後の操縦はWebアプリ(PCブラウザ javascript+html←【WiFi】→RasPi, python,php←【UART】→ESP32 c++)とGamePad(BlueTooth,ブラウザchromeのAPI経由)で行う。改造前より改造後は、20~30年未来と言えると思う。
■ROBOT操縦画面
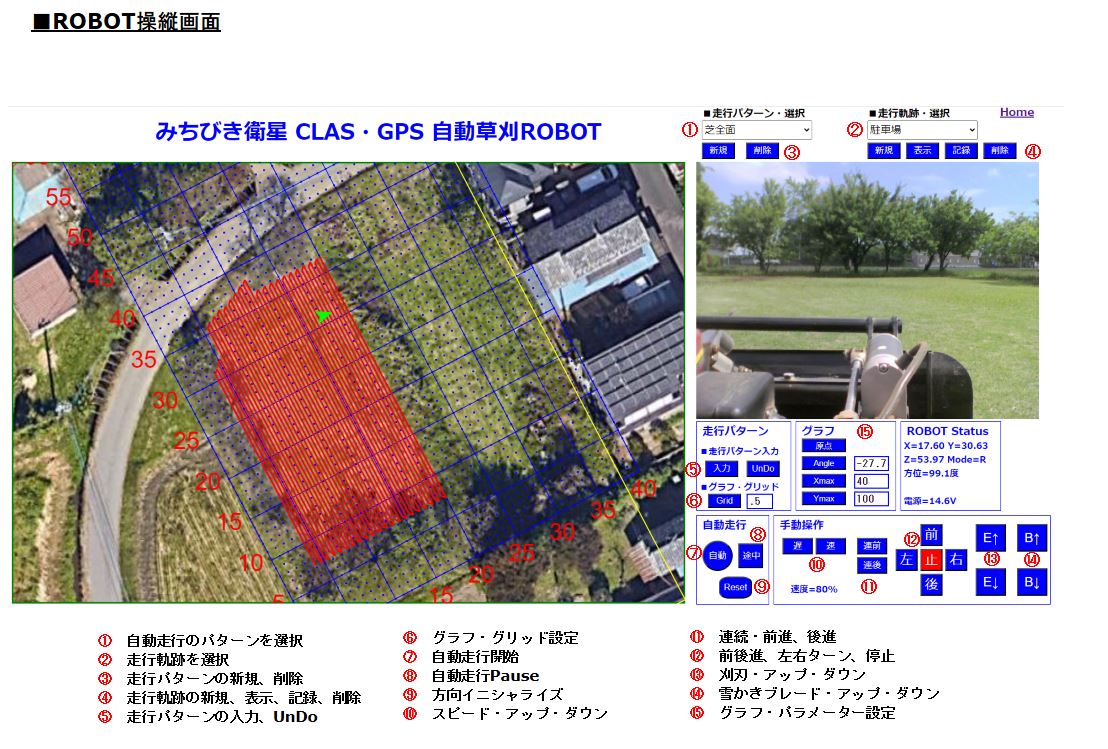
ROBOT操縦画面です。この画面は、Webアプリ(html+javascript)で作られているので、PC(Windows10のみ動作確認済)、タブレット(Android12以上のみ動作確認済)、スマホ(Android12以上のみ動作確認済)等のWebブラウザで表示し、操作することが可能です。走行パターンを入力する時は、PC等の大画面とマウスでの操作が良いです。草刈り現場では、スマホとGamePadが身軽です(WiFiはROBOTと接続するだけで、OK)。GamePadで、走る・曲がる・止まる、自動スタート、Pause、刈刃アップダウン、ブレードアップダウン、スピード・アップダウンなのど基本操作が全て可能となっています。スマホを胸ポケットに入れ、GamePadだけで、操縦可能です。

■Top画面
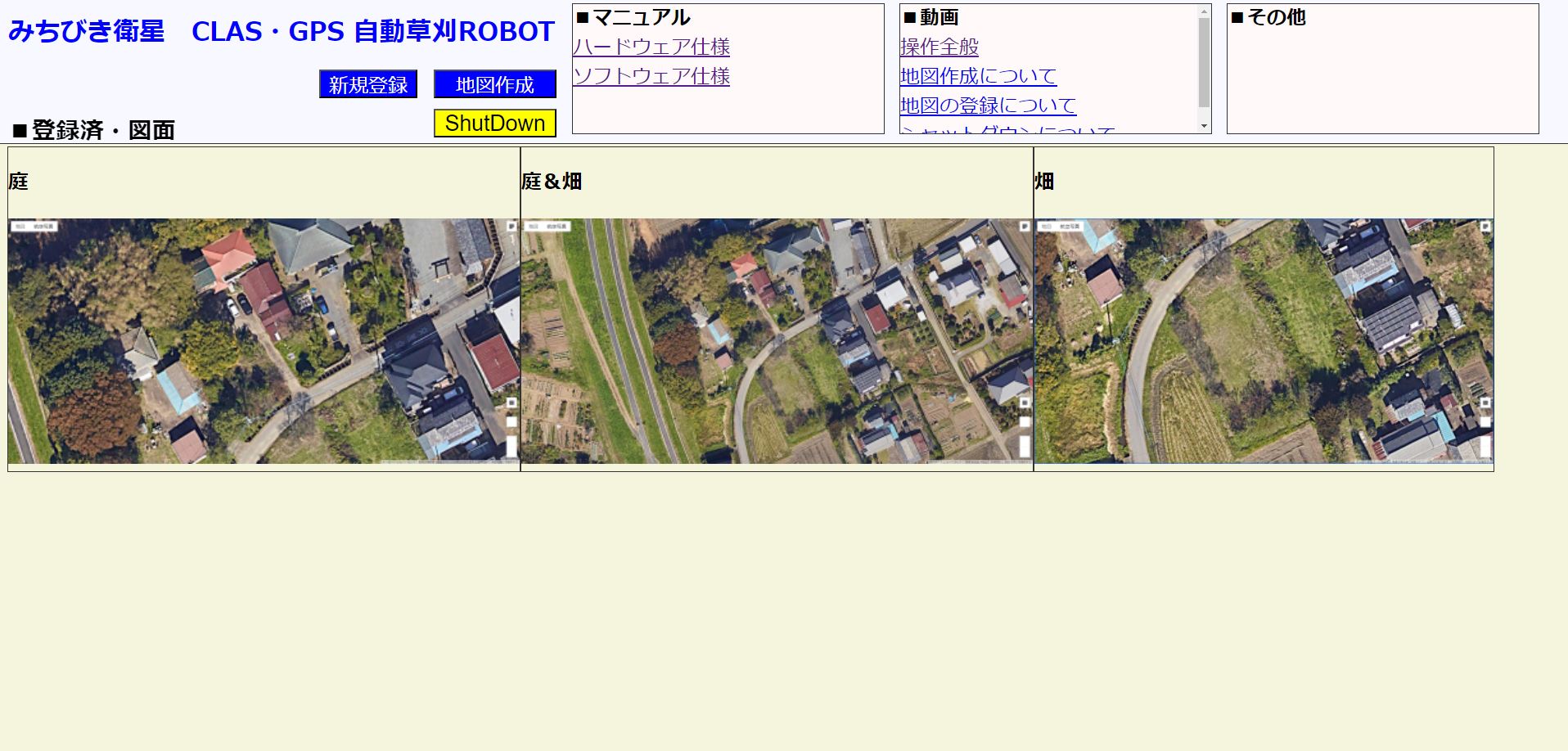
Top画面です。草刈り現場は複数の場所にあります。それぞれの現場に必要な地図や走行パターン等がありますので、それらを登録し選択して作業を行います。メモリーの許す限り、登録数に制限はありません。
また、マニュアルや動画説明などもROBOT内に格納されていて、このページから見ることが可能となっています。
■走行軌跡の記録
動画の方が解り易いと思いますので、上の動画を参照して下さい。
大雑把な走行パターンならば、航空写真地図を見ながらの入力で良いですが、畑の端や障害物ギリギリまで草刈りをやるのであれば、cmレベルの精度が必要となりますので、CLAS GPS自身を使った走行軌跡が必要になります。この走行軌跡を見ながら、走行パターンを作成します。この作業は、多少面倒ですが、一度走行パターンを作成してしまえば、ずっと使うことが出来ますので、定期的に同じコースを走行して草刈りをするのであれば有効だと思います。
■走行パターンの入力
これも動画の方が解り易いので、上の動画を参照下さい。
走行軌跡を見ながら入力して行く作業となります。これも面倒な作業ですが、ずっと使うことを考えればペイすると思います。
ゆくゆくは、走行軌跡から自動生成するようにすべきです。これは、将来へ向けての宿題です。
刈幅が550mmなので、往復の間隔はオーバーラップも必要なので400mm程度が最適です。400mm間隔で入力するために、グリッドを0.4mに設定すれば、このポイントにスナップ(引き込まれる)されるようになっています。
走行パターンの先端が、直角ターンではなく、尖った形状にしています。ROBOTは、次の目標ポイントへ向かう時、前進で行くか後進で行くかを、ターン角度が小さい方を選ぶようになっています。直角だと、この判別がつかないので、先端を尖らせておけば、確実にどちらを選択するかを、ROBOTに知らせることが出来るからです。
■受注生産について
多くの方々から、お問い合わせを頂き有難う御座います。自動草刈り機は受注生産しています。ここから、お問い合わせ下さい。