 ■2016-11-01
■2016-11-01
この素材を入手したので、今後電子回路を組み込んで行く予定。
基本構成は、
・WiFi・USBデバイス・サーバー
・Arduino Nano
・Webカメラ
を考えている。
USBデバイス・サーバーを選ぶ理由は、これだと工房のPCのUSBの口にArduinoや、Webカメラが接続されているのと同等になり、ロボットを遠隔操作中でも、Arduinoの中のプログラムを書き変えることが出来る。従って、開発効率が上がると思えるからだ。
■2017-08-28
しばらく、放ったらかしでしたが、ようやく重い腰が上がりつつあります。長い時間が経過してしまい、使えるデバイスも、進化しました。やはり、これから作るならばESP32だと思います。現在、あれこれ思案中なので、こちらで試行錯誤しています。
構成は、以下に変更。
・ESP32
・Androidスマホ
・WiFi・USBデバイス・サーバー(プログラム開発時のみ)
■2017-08-30
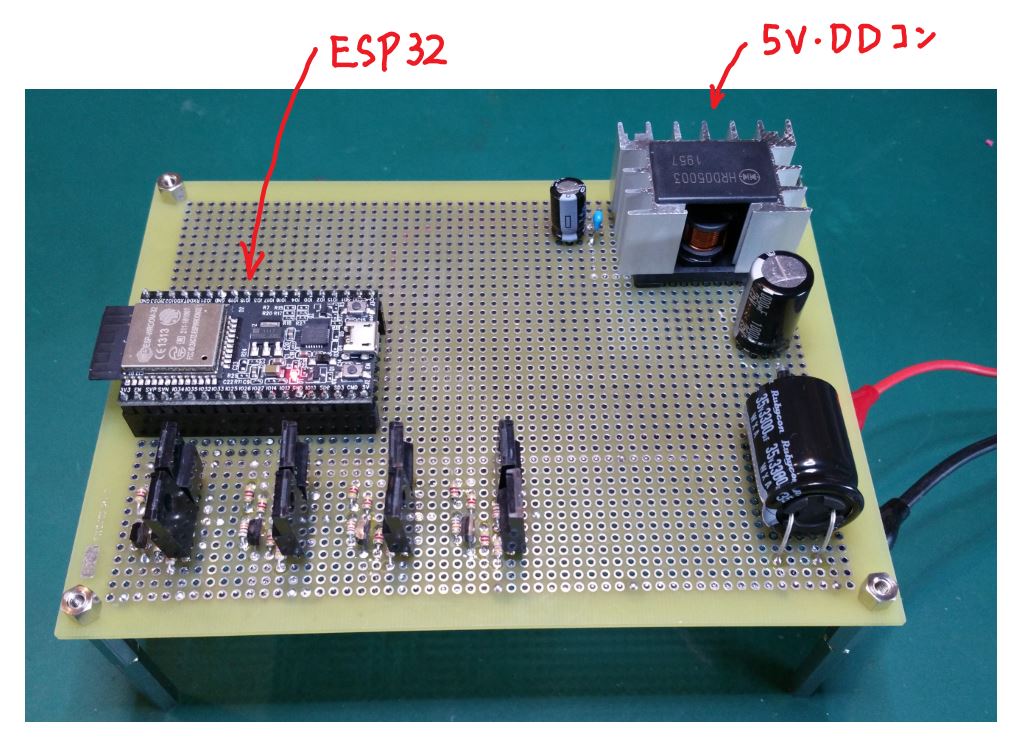
とりあえず、動かせるようになりました。まだ、電子回路を入れるケースも作ってないんで、秋月のビニール袋に入れて、走行させてみました(これでは、秋月の宣伝カー)。YouTubeにUpするレベルでもないんで、工房のエリアに置きました。5V DDコンは、ESP32に5Vを供給するとともに、外部に装着予定のスマホとデバイスサーバーへも電源供給する予定なので、余裕を持たせて3Aの供給能力のものを搭載した。
自分的には、ESP32で動かしている点が新しい。このデバイスは、IOがたくさんあるので、従来ESP8266+Arduino Nanoでやってたことが、このデバイス1個で可能になった。3号機をつくるということより、このESP32を使ってみることの方が、よりモチベーションが高い。
■2017-09-11
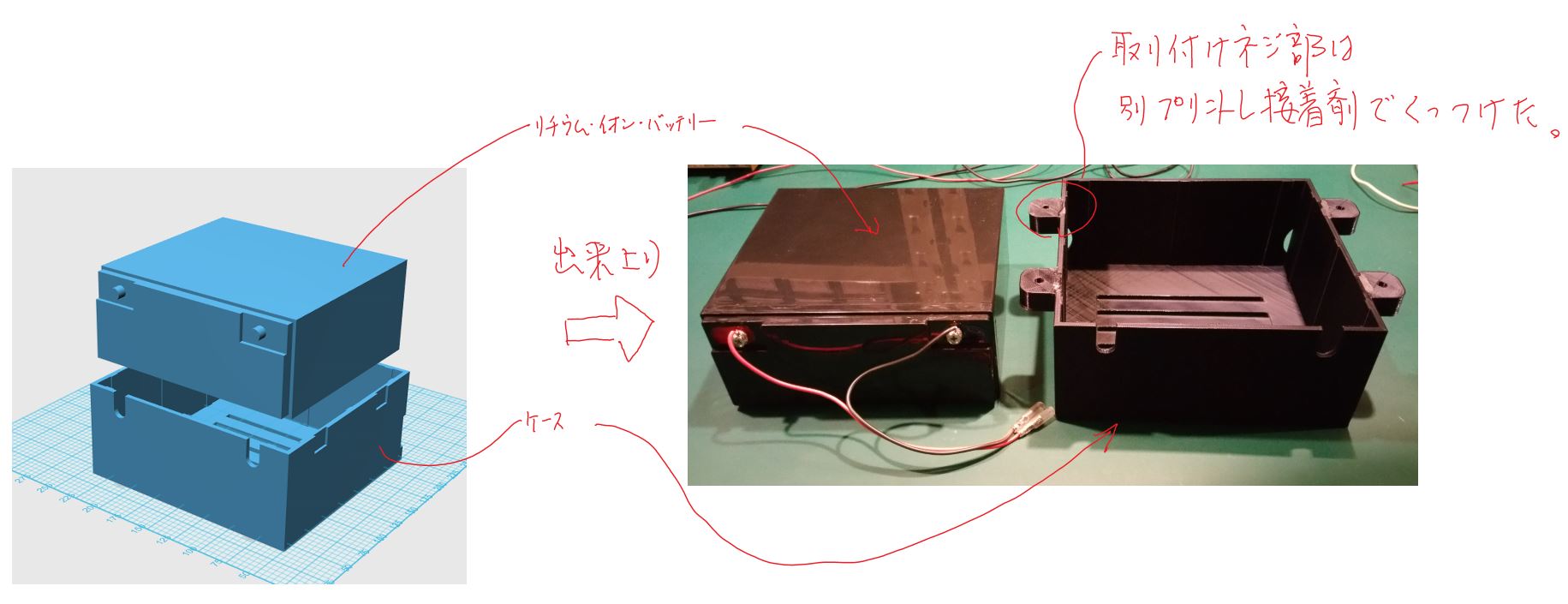
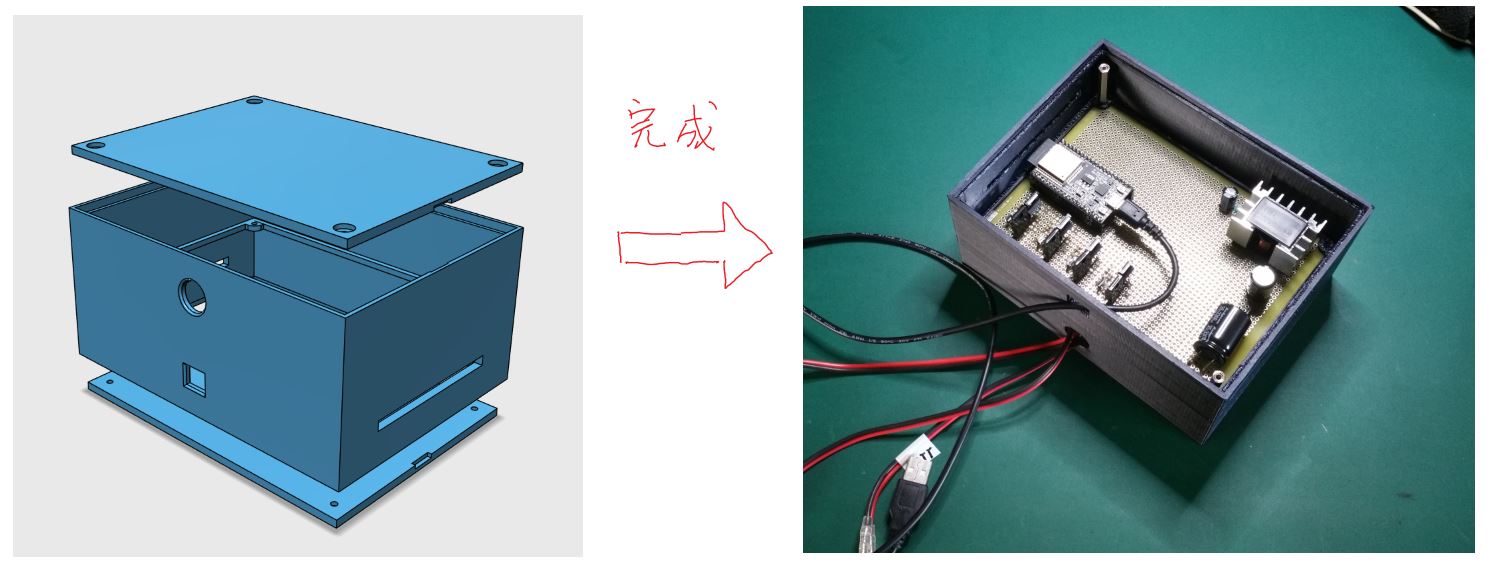
BATTと電子回路のケースが完成したので、ロボットらしくなってきました。BATTはシャーシ下に装着し、電子回路は、ESP32でWiFiの送受信する都合があるので、シャーシ上に付けました。
まだ、基本的な走行系しか実装してないので、今後カメラ、道具などを搭載して行く予定です。
■2017-09-13
★ロボット3号機・いろいろ装着
前からやってみたかった遠隔プログラム書換え用のUSBデバイス・サーバーと、スマホ・カメラを装着してみた。USBデバイス・サーバーの方は、そこそこらしく動作するが、100%は期待通りには動いてくれていない。遠隔プログラム書換えは、うまく行ったが、デバッグの方はSerial.printがプログラムの処理時間に大きく影響しているらしく、動きが変になる(追実験で、理由は不明だが、Arduino IDEのシリアル・モニタを一度切ってからプログラム書き込みしたら、全て期待通り動作した。これで、ロボット・プログラム開発の効率は大幅に上がる。ESP32 OTAによる遠隔書き込みも成功した➡試行錯誤)。スマホ・カメラ動画はスタンドアロンで動作しているので、従来通りまったく問題無く機能した。


★ロボット3号機・スマホ・カメラ動画
自宅の庭を一周させてみたが、クローラーの凹凸で、振動が激しい。操縦は、この動画を見ながら工房2Fからやっている。犬猫目線で、ロボットに乗って操縦しているかの如き、疑似体験が味わえる。
■2017-09-16
★走行テスト
ほぼ々々、基本部分は出来上がったので、外に出て走行テスト。
■2017-09-26
★操縦システム

操縦システムは、PS4コントローラー = (Bluetooth)⇒スマホ =(WiFi) ⇒ROBOTとした。スマホを間に挟んで、WiFiを使っているのは、操縦範囲を広げる(BTでは10m、WiFiならば200m)のと、ROBOTからの情報(バッテリー電圧、その他センサー情報など)を表示するため。スマホ単体でも可能だが、PS4の方が、圧倒的に操作性は良い(詳細は試行錯誤参照)。
PS4のBluetooth接続では、タイムラグが気になる(USBではOK⇒Gamepadで解決)。
■2017-10-07
★ゲームコントローラー(Bluetooth 中華GamePad)での操縦
ROBOTの操縦は、PC or スマホでやっていたが、操作性には改善の余地があった。PCのKeyboardやスマホ・パネルに視線を向ける必要があり、ROBOTを直視し続けながら操縦出来ない点である。この改善策として、ゲームコントローラー(PS4はタイムラグでNG⇒中華GamePadを採用)での操縦を試行錯誤してきた。紆余曲折はあったが、ほぼ実現出来た。部屋の中での走行は、クローラの3号機ではやかまし過ぎるので、タイヤの3.5号機で行った。
■サイト内・リンク
inohana says:
いがらしさん
コメントありがとうございます。
この素材は中華製の、
これ
です。
あまり、お勧めしませんよ。見映えは力強いですが、動力伝達系に難ありです。
いがらし says:
通りすがりなのですが,素材のクローラー台車は何をお使いなのかご教授頂けないでしょうか?