★バリカン・上下機構
★初めての・本番テスト
★バリカン・刃先・モニターカメラ

★工房から遠隔操縦
★草刈り・チップソー装着
★RTK-Navi(Rover)を実装

★開発コンセプト
・基本共通部分を最小構成として、カスタマイズ化を容易とする。
(様々な用途のROBOTを、サクっと製作出来るようにする。冒頭の動画は、カスタマイズとして草刈り機化した事例。このESP32の電子回路BOXを使って、比較的短期間で制作出来たと思う。)
★主な仕様
・ESP32(WiFi & ROBOT Control,OTA組込み済,WiFi APモード/クライアントモード切替SW)
・モータードライバー(TB6643KQ×2)
・ジャイロ・センサー(L3GD20)
・5V 3A電源(HRD05003 DDコン)
・ヘッドライト(LED 3W)
・リチウム・イオン電池(12V 10Ah)
・4WD・ROBOTシャーシー
・動画撮影用・スマホ(電子回路BOXに充電USBソケット付き)
・操縦用・スマホ(ROBOT動画・Status表示、Bluetooth→WiFi)
・操縦用・GamePad(Bluetooth BLE)
・バッテリー電圧・操縦スマホに表示
・消費電流・操縦スマホに表示
・過電流・シャットダウン保護機能
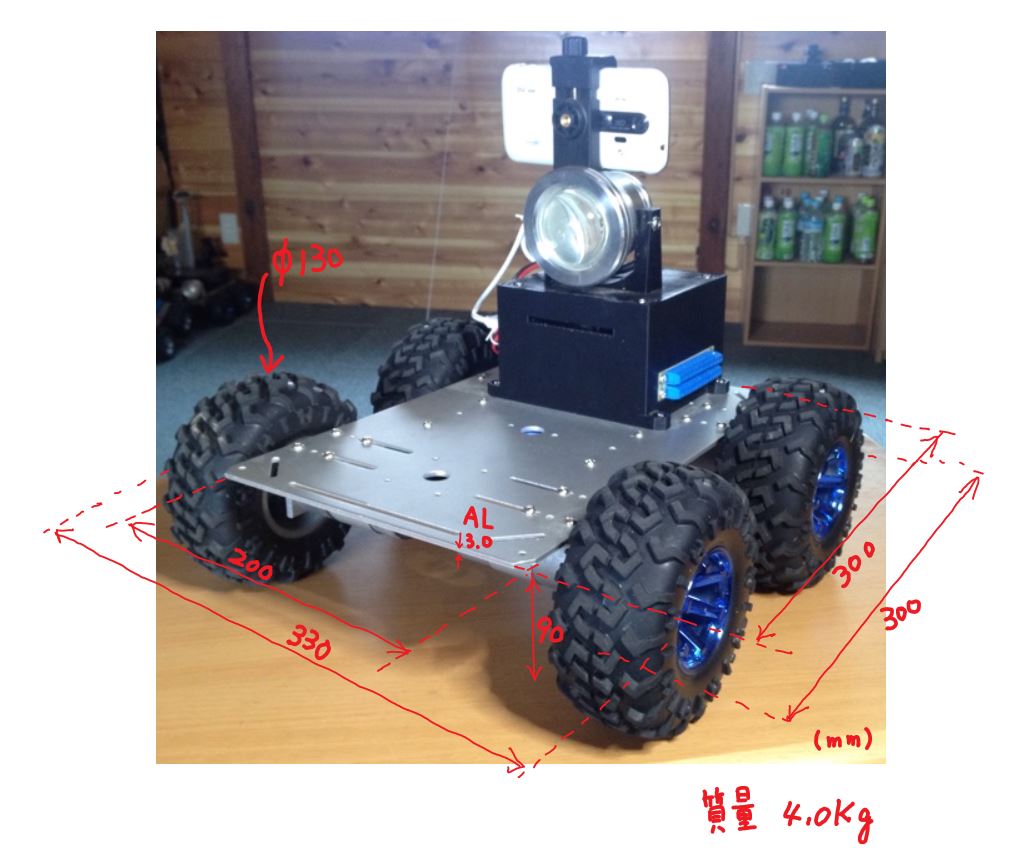
★サイズ
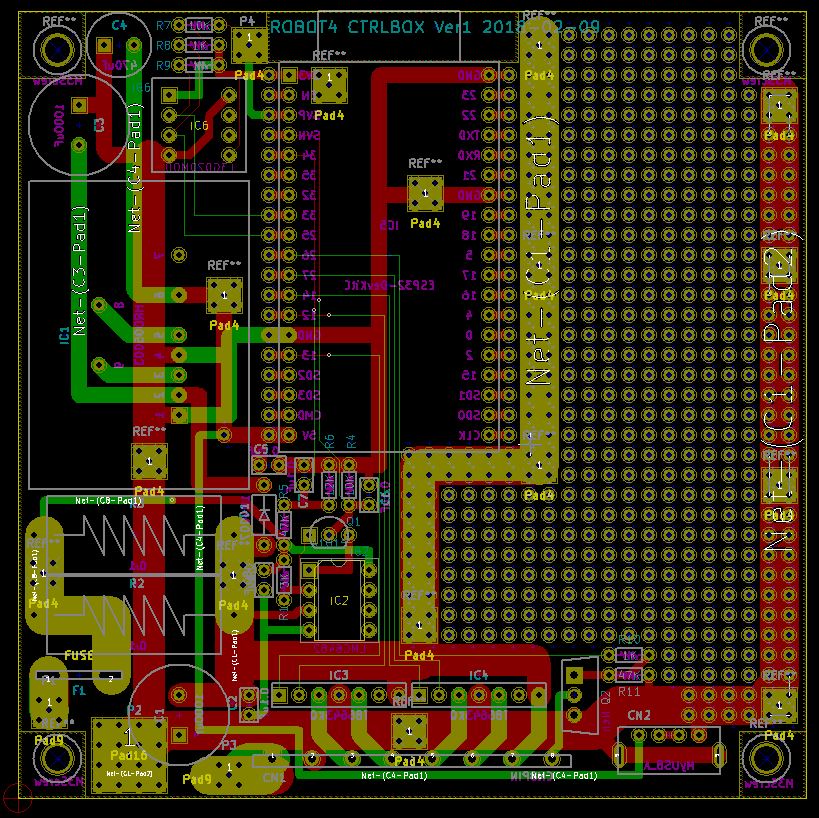
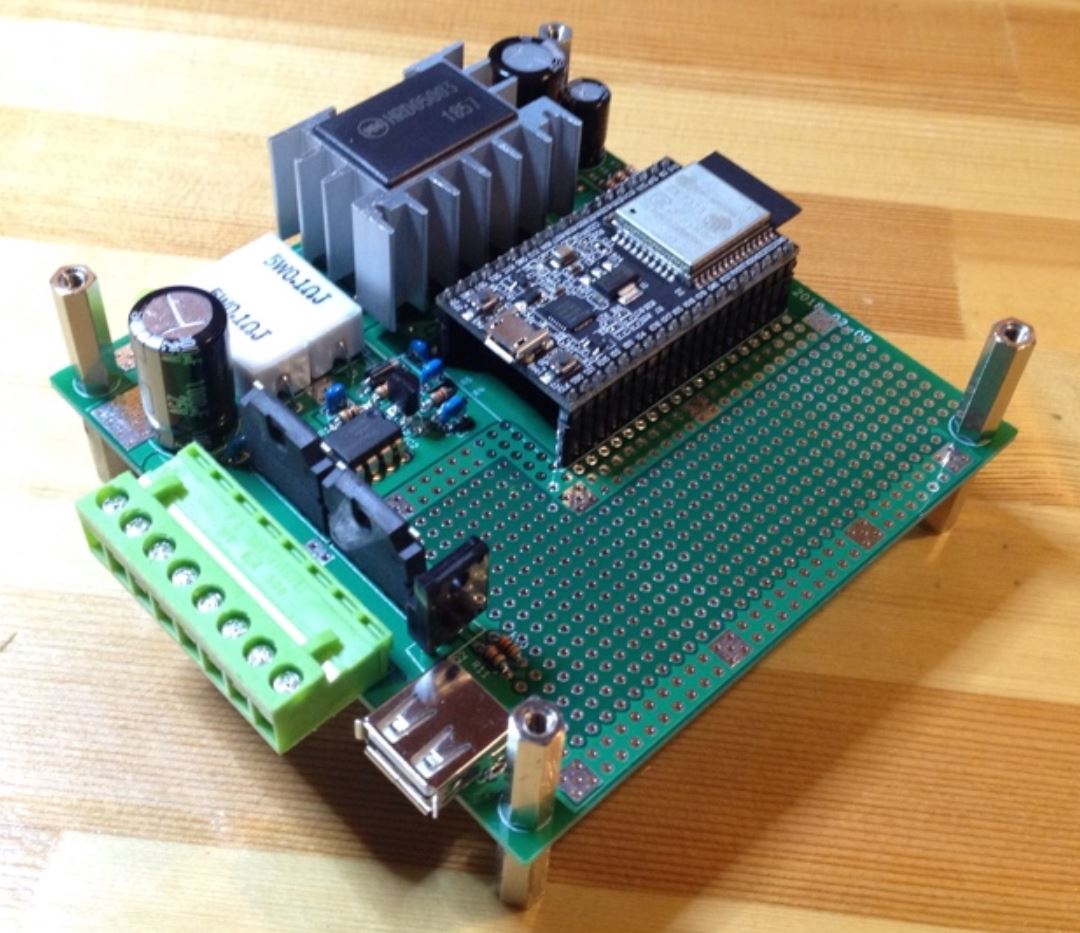
★電子回路・基板
基板サイズは、Fusionの経済サイズ(10×10㎠)。共通部分の電子部品を片側に寄せ、約半分を空きスペースとしてカスタマイズ化のためのユニバーサル基板パターンを作り込んだ。基本の共通部分とは、走行系とヘッドライトのみ。ESP32-DevKitCのIOポートは、半分以上空きとして、カスタマイズに使える。
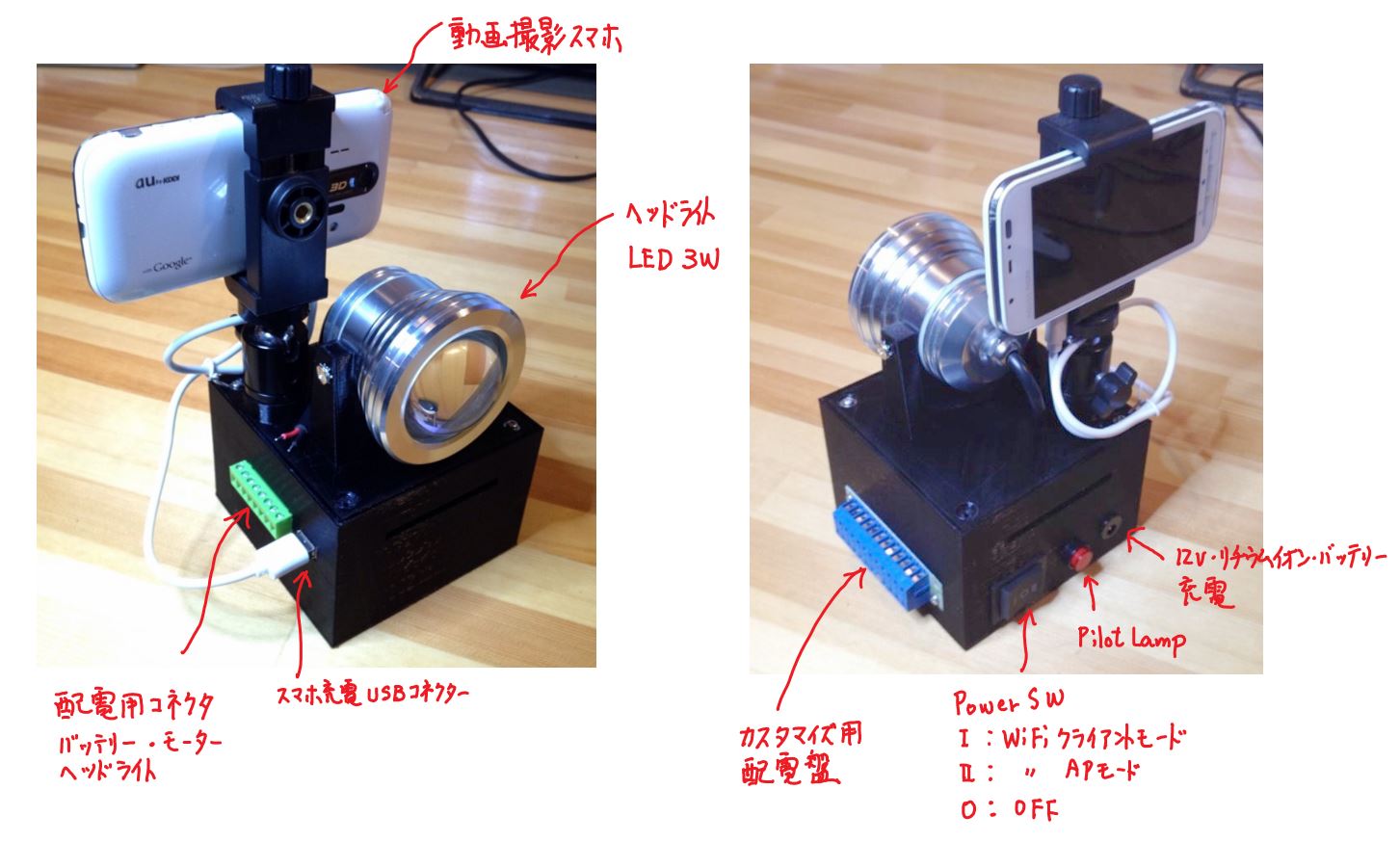
★電子回路BOX
★操縦システム
左側のGamePadで操縦する。ROBOTの目として、動画撮影用のスマホから送られてくる画像(音声も)を見ながら、遠隔操作する。送信元のスマホは、ストリーミング動画・Web Server なので、同時に複数のWebブラウザ(大画面PC等)に表示可能。ROBOTのStatus(バッテリー電圧、消費電流、スピード設定、ジャイロ方位)も、手元のスマホに併せて表示している。WiFiの設置の条件にもよるが、100m程離れての遠隔操縦が可能(WiFiリピーター併用で、1Km)である。APモードでは、ROBOT自身(ESP32)がアクセス・ポイント・WiFiルーターとなる。
