★走行テスト動画
★企画意図
お客様からの、開発受託機なので、私なりの意図。
DCブラシ・モーターで何機種かのROBOTを製作してきたが、トルク・スピード性能と耐久性・信頼性の更なる向上を実現するために、インホイール・モーターを採用。この機種では荷物運搬機として、60Kgの積載・運搬を実現する。シャーシーのサイズは、ROBOT4の4倍、400×600㎟。
またこの開発によって、インホイール・モーターのコントロール技術を確立し、展開を図って行きたい。
★主な仕様
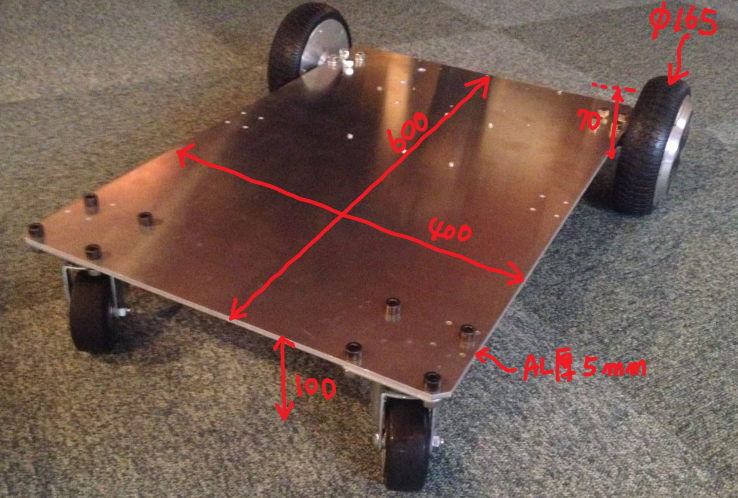
| 最大積載量 | 60Kg |
| シャーシー・サイズ | 400×600㎟ |
| タイヤ・モーター | 36V250W 6.5インチ・インホイール・モーター×2 |
| スピード | 0~10Km/h(0.2Km/h Stepで可変) |
| バッテリー | 12V 10Ah |
| WiFi | IEEE802. 11a/b/g/n 親機/子機モード |
| 操縦 | Bluetooth Game Pad+PC(or スマホ) |
| CPU | ESP32×2 |
★最大積載量
Hope Carry 0の目標最大積載量は、60Kgだがテストする荷物が身近になかった。先日、ROBOT見学のお客様が来訪して、その中の若い女子(掲載許可は頂いています)が5?Kgだったので、乗って頂いた。多少スタート時にモタついたものの、前後進、左右回転してみたが、問題無く走行した(中華インホイール・モーター凄い!)。私的には、動画を撮りたかったが、そこまではお願い出来ず、静止画で我慢、、、

★走行試験
今まで、路面条件の良い部屋の中で走行試験をしていたが、庭に出してやってみた。部屋の中では、時速10Km/hも出すと極めて短時間の走行しか出来ないが、外では比較的長い距離の走行が可能である。元々、このような遠隔操作での使い方を想定していないが、片側が自在キャスターなので、直進させるのは難である。
試験している最中に、宅急便で山形から米(つや姫)30Kgが届いたので、これを載せてのテストもしたが、インホイール・モーターのトルクは充分だと思う。
このような遠隔操作をするのであれば、直進性の改善が必要である。ジャイロ・センサーを使って、ブレを抑え込むことは、可能だと思う。