■2019-11-13
★ROBOTにRTK・GPS実装
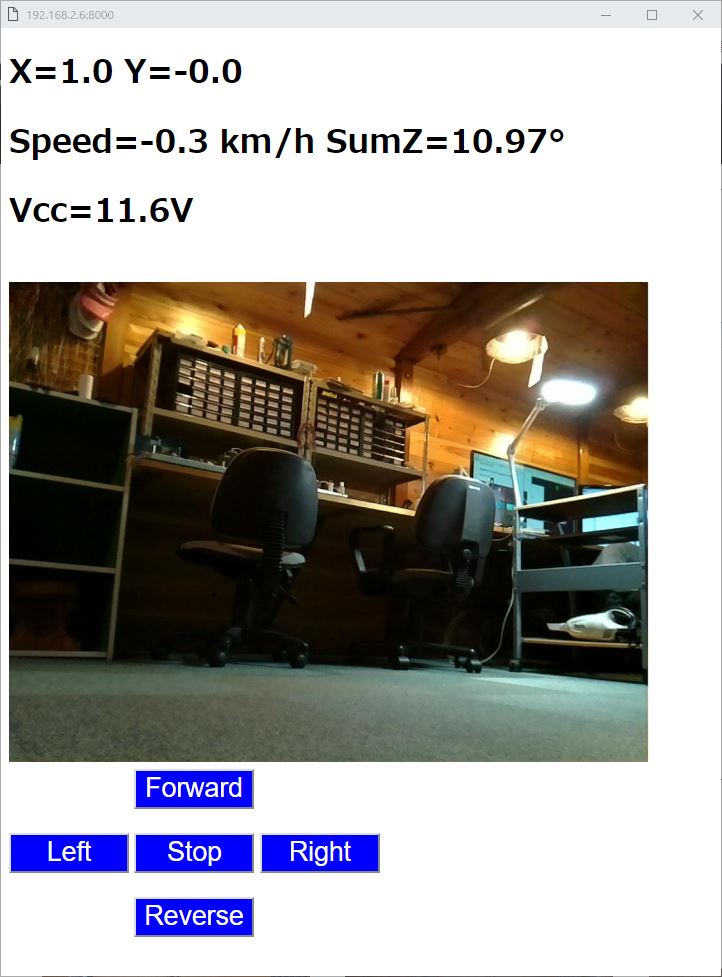
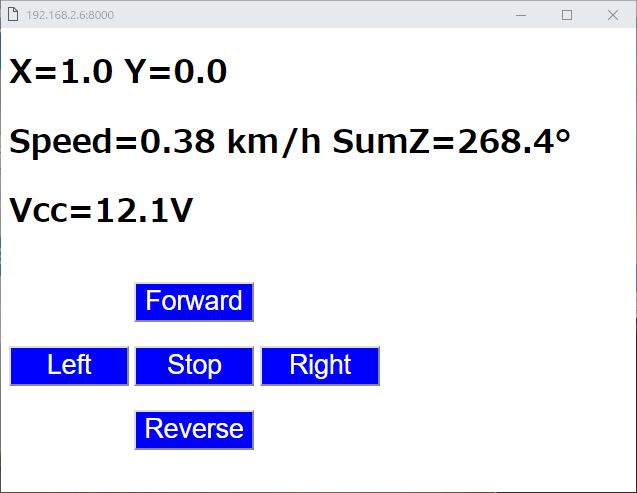
製作中の4WD・ROBOTにF9PのRTK-GPSを実装して走行試験を行った。工房からモニター動画を見ながら、GamePadで遠隔操縦をしている(入力された座標による、自律走行も可能)。
ROBOT1号機の世代(LEA-M8T)と比較すると、技術の進化を感じる。当時は、PC側のRTKNAVIでRTK演算し、ROBOTに座標を送信していたが、現バージョンでは、ROBOT内のF9PのRTKエンジンでそれを行っている。RTK-Fixも、樹木・建物によるGPS電波の遮蔽をものともせず、非常に安定していて、強い(高度も正確に計測可能なので、庭のミニ・ロータリーに30cm程の高低差があるのも、解かった)。
電子基準点は、自前で、中華GPSアンテナ+ZED-F9P+RaspberryPiZero・str2strをrtk2go.com経由でNtrip・RTCM配信している。運用開始頃は、不安定でrtk2goから遮断されたりして、試行錯誤したが、現在は年中無休で安定・連続運転している。
■2019-11-11
★限界距離
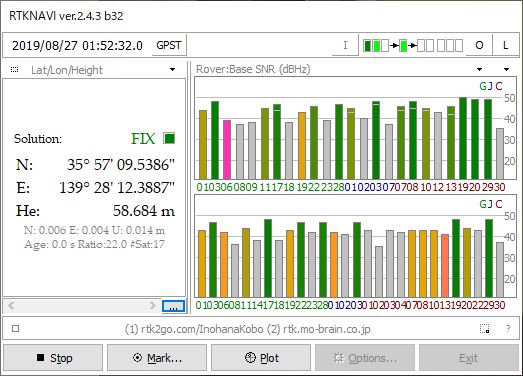
先日、Baseから遠距離地点でのRoverのテストを行う機会があった。埼玉川越「いのはな電子工房」・Base←→宇都宮・RTK-GPS-UNIT・Rover、距離約72Kmでも、安定したRTK-Fixが得られることを確認した(1時間程、徒歩移動計測したが、1度もFixがはずれることはなかった)。UINTの電源ONで、瞬時にRTK-Fix。Base,Rover共にF9Pで、これが2周波の威力か?。測位ゆらぎの評価はしていないが、たぶん距離10Km以内の近傍より、ゆらぎが大きくなっている印象だが、それでも、Fixしている状態では、Single,Floatと比較したら圧倒的に、ゆらぎは小さい(数cmのオーダー)。
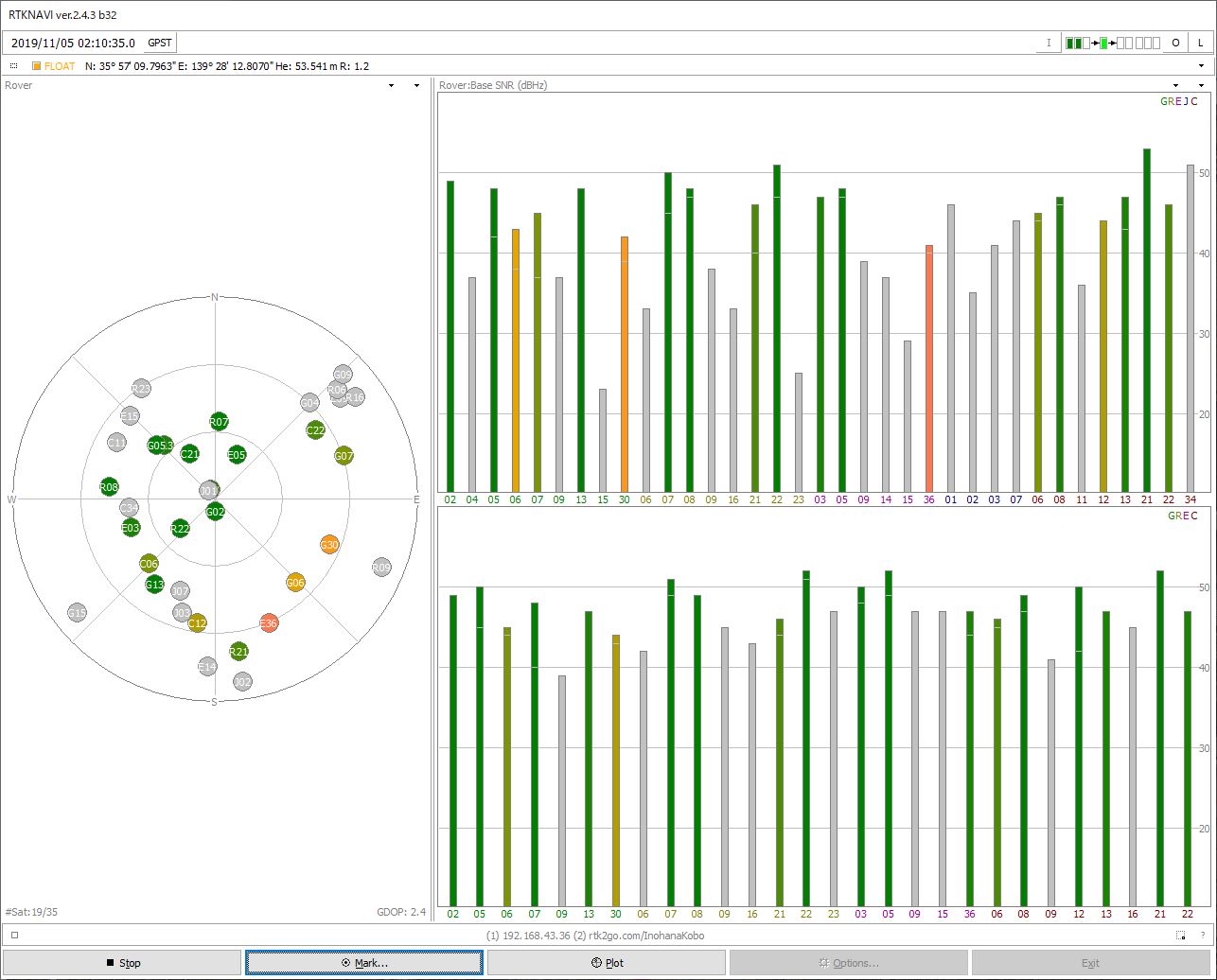
■2019-11-05
★近隣を計測その2
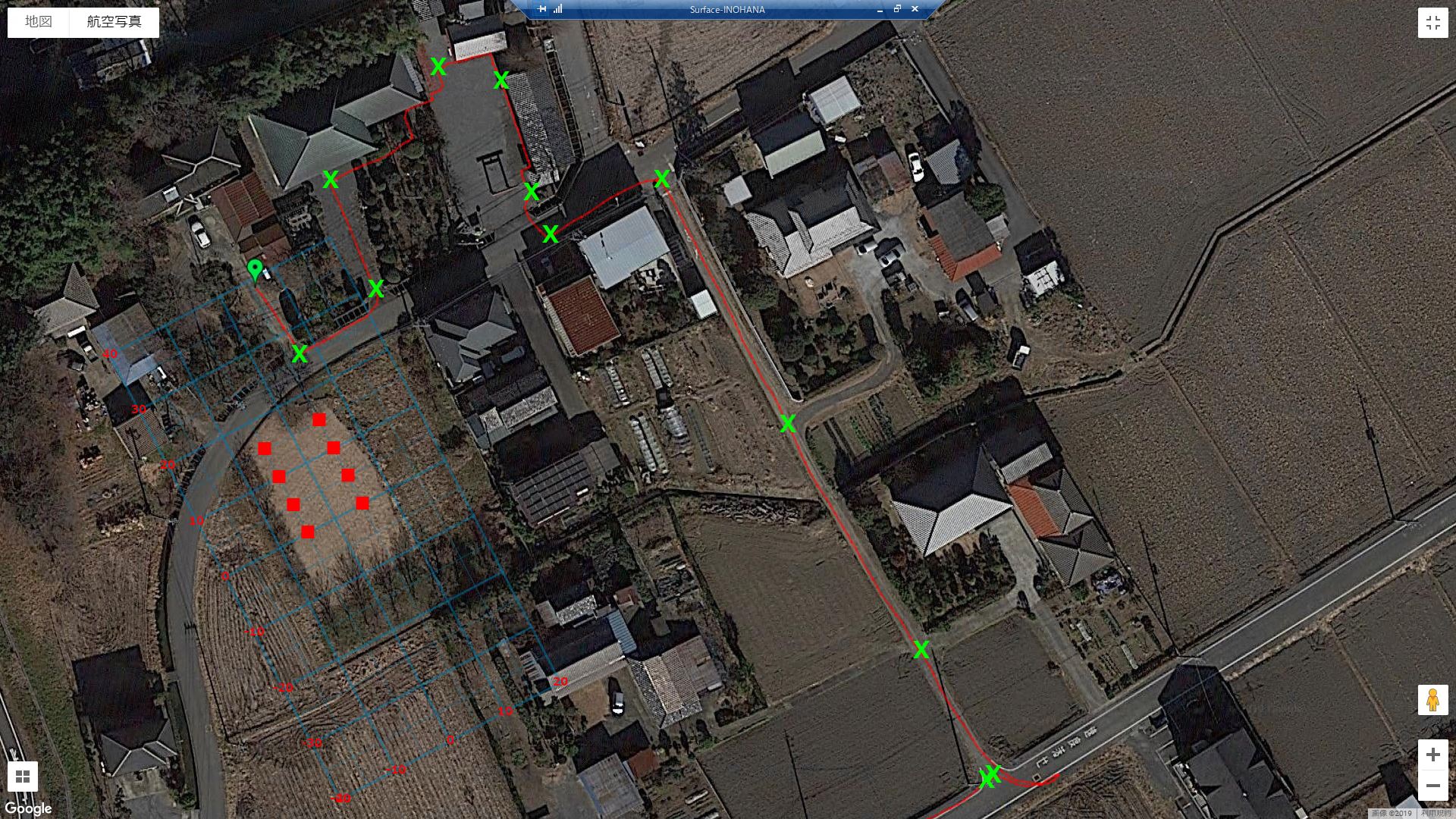
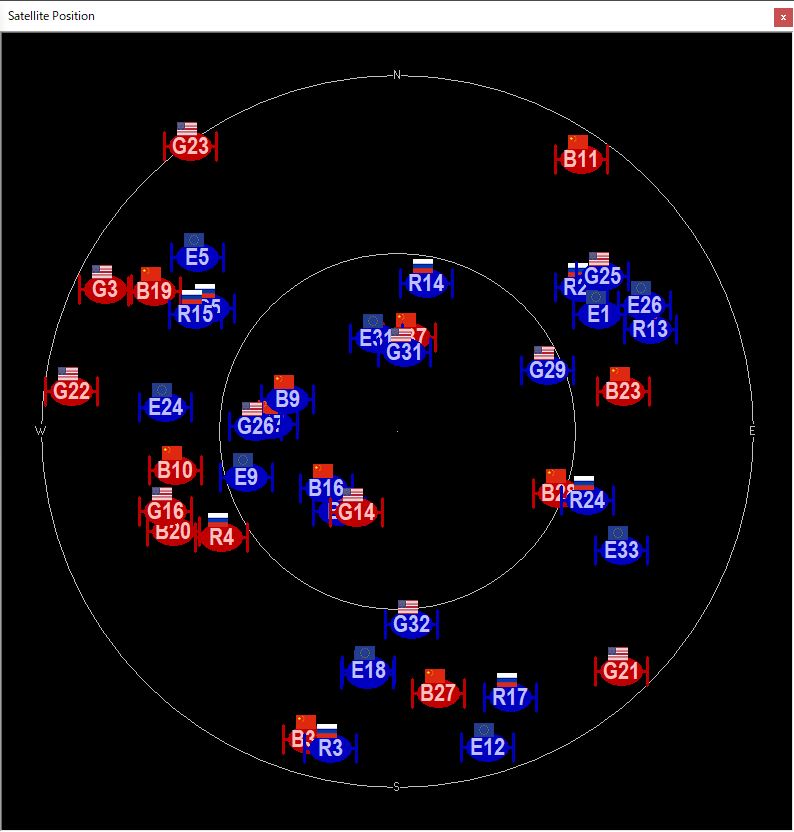
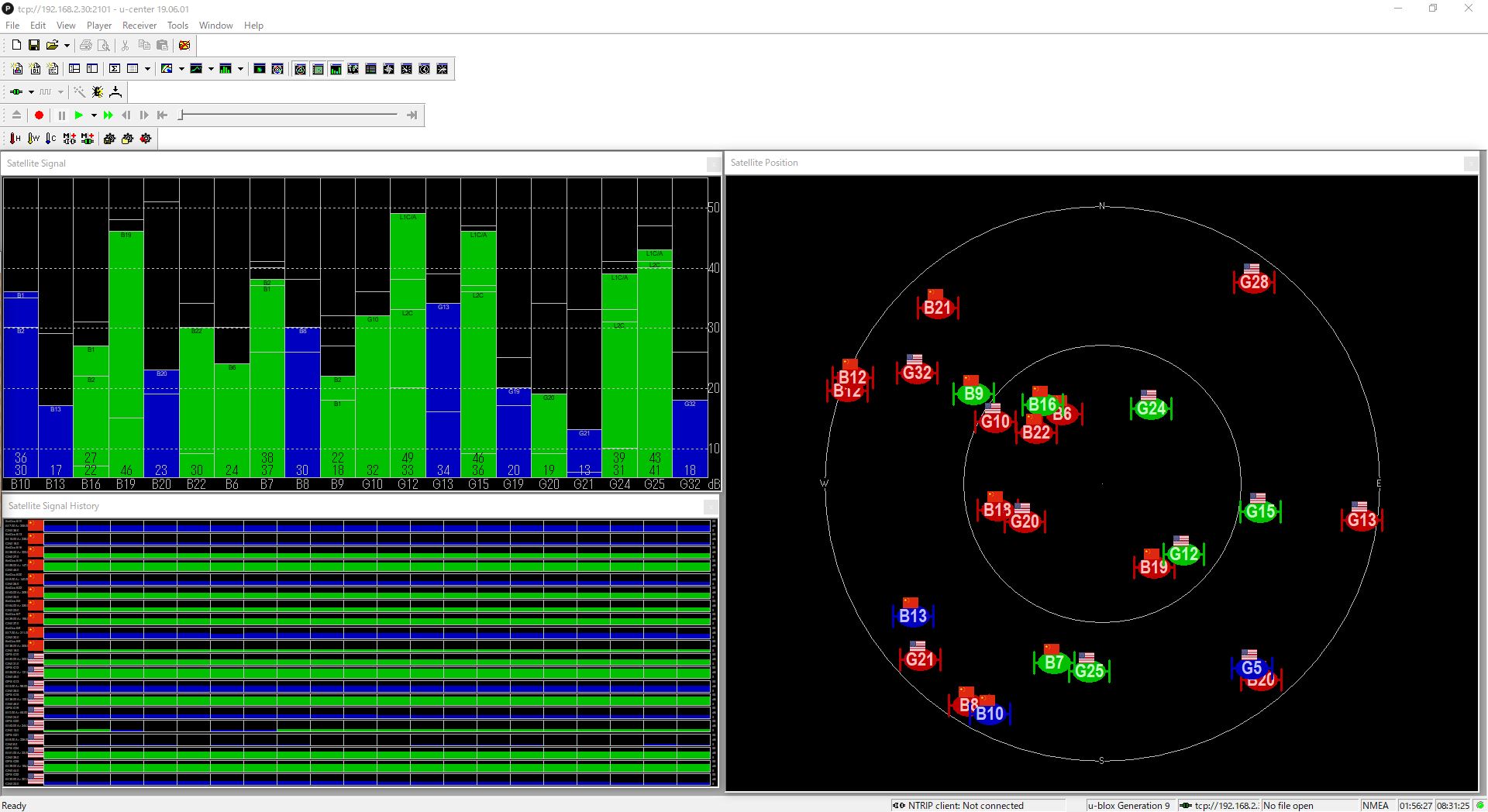
建物・樹木等の影響を確認する為に、近隣の神社や寺の境内を含めて計測したが、Fixがはずれることは無かった。特に、寺の屋根は高く、測定ヵ所からは北方向がほぼ塞がっているが、F9PのRTK-Fixには問題は無かった(この時は、RTKNAVIはFloat)。以下がその時のGPS衛星の配置だが、やはり北方向の低いエレベーションの衛星は、RTK演算には登場していない。
■2019-11-04
★近隣をRTK-GPS計測
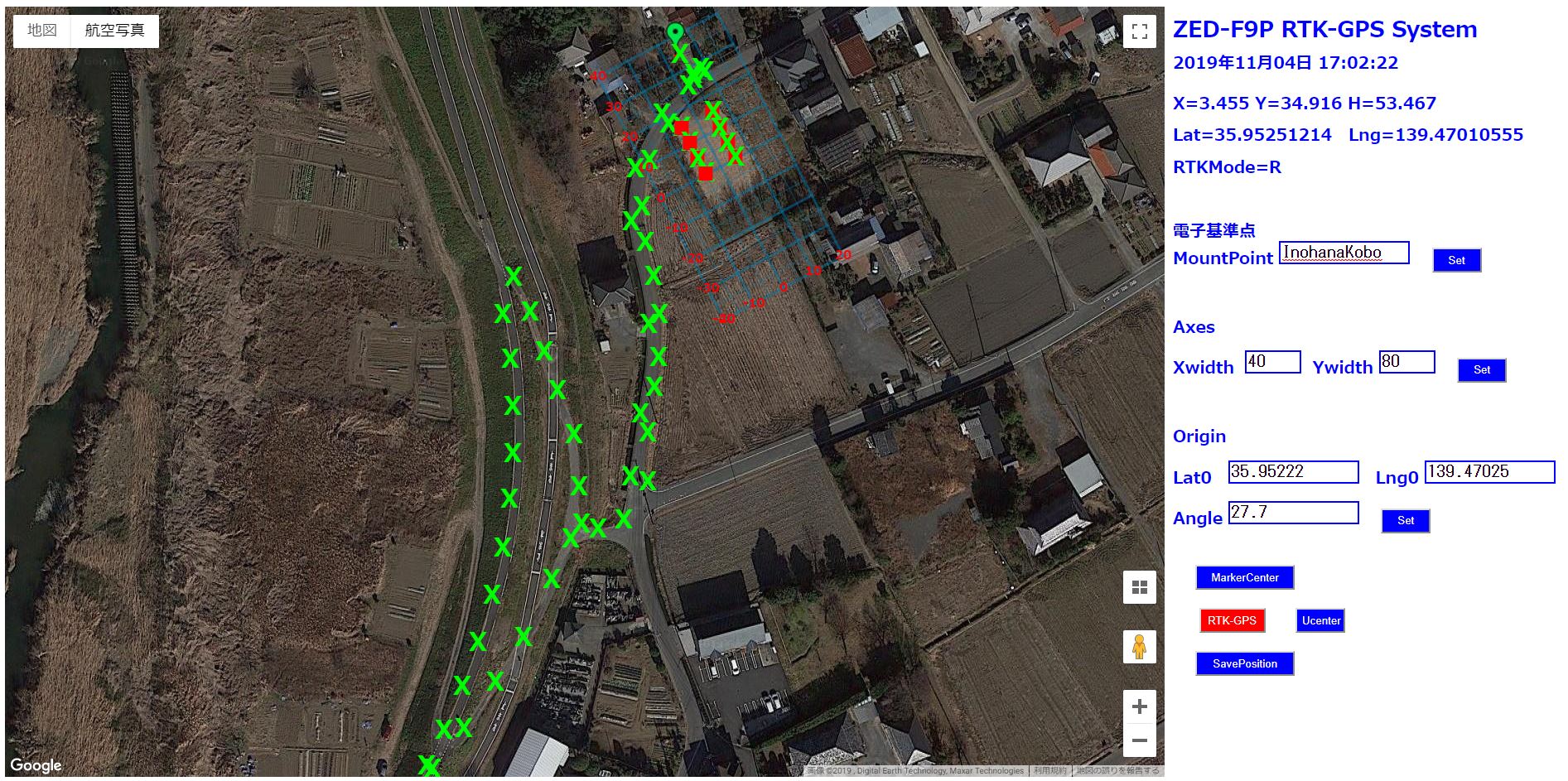
RTK-GPS-UNITの基本的な部分が完成したので、近隣の道路を試験的に計測。SavePositionボタンをPushすれば、その場所の座標やRTKのMODE等がRasPiのSDメモリへ記録される。Base基準点のデータは、rtk2go経由、スマホ・テザリングを介してUNITへ供給している。試験中、1度もFixがはずれることは無かった。お手軽・廉価な測量に使えると思う。
■2019-10-31
★同時動作
RTK-GPSにハマりつつある。
RTKNAVIとF9PのRTKエンジンの比較をしたくなり、BaseとRoverの受信信号を同条件としてやるには、どうしたら良いか考えた。Baseの方は、PC・RTKNAVIとRasPi・F9Pで、rtk2goから同じデータを受け取れば良い。RasPiでは、2本のstr2strを動作をさせ、一方は、rtk2goからのBase信号をF9PのUART1へ流し込み、もう一方は、F9PからのRoverデータをUSBからRasPi経由でRTKNAVIへtcp送信している。-bオプションで起動しているので、同時並行でu-centerへも接続可能(絵にしないと、解かりずらいですねぇ)。これで、F9Pの設定をu-centerでいじり、F9PでのRTK状況をRTKNAVIで視角化モニターしながら検討出来るようになった。
結果は、ざっと見、互角で、両方Fixのケースがほとんどだが、時折、一方がFloatとなったりする場合もある。
■2019-10-28
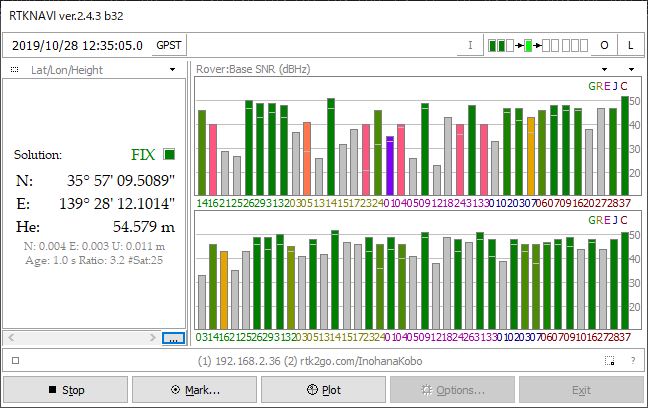
★テザリング
今まで、RTK-GPS-UNITの試験は、WiFi範囲でやってきたが、より広域(と言っても1Km程度)で行った。電子基準局の基準データはrtk2go.com経由、テザリングでZED-F9Pへ流し込んでいる。UNITは、車のダッシュボードの上に置いた状態で衛星受信状況は悪いが、Fixは維持されている。この状態で走行し、近隣のコンビニまで走行したが、途中Fixがはずれることは無く、良好な結果であった。
通常のGPS-NAVIでは、その測位精度不足を補うために、マップマッチングを行っているが、RTK-GPSでは、高精度なので不要である。逆に、地図の精度より測位精度の方が上である。
他の基準局とのテストでは、100Km程度は行けそうなので、近い内に限界テストを実施してみたい(高速道路で遥か彼方まで行く必要がある)。
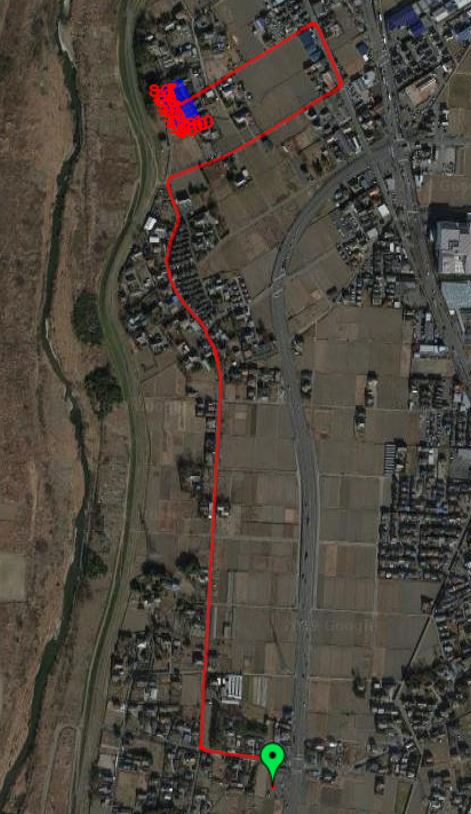
とりあえず、どの国の衛星の組み合わせが良いか、今後の検討が必要だが、全部ONしてみた。頭上は、衛星だらけ!!!
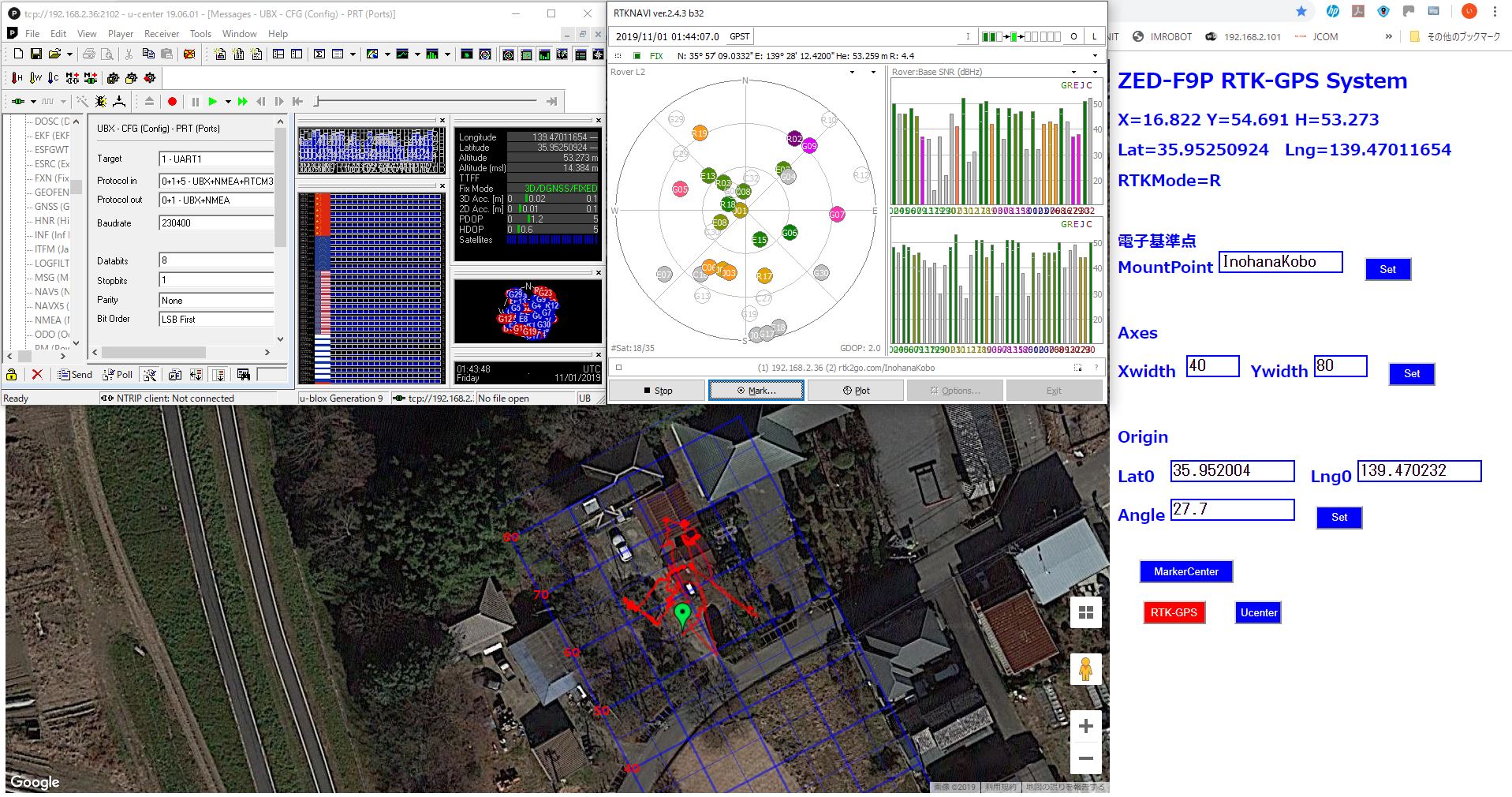
■2019-10-25
★ZED-F9P RTK-GPS System
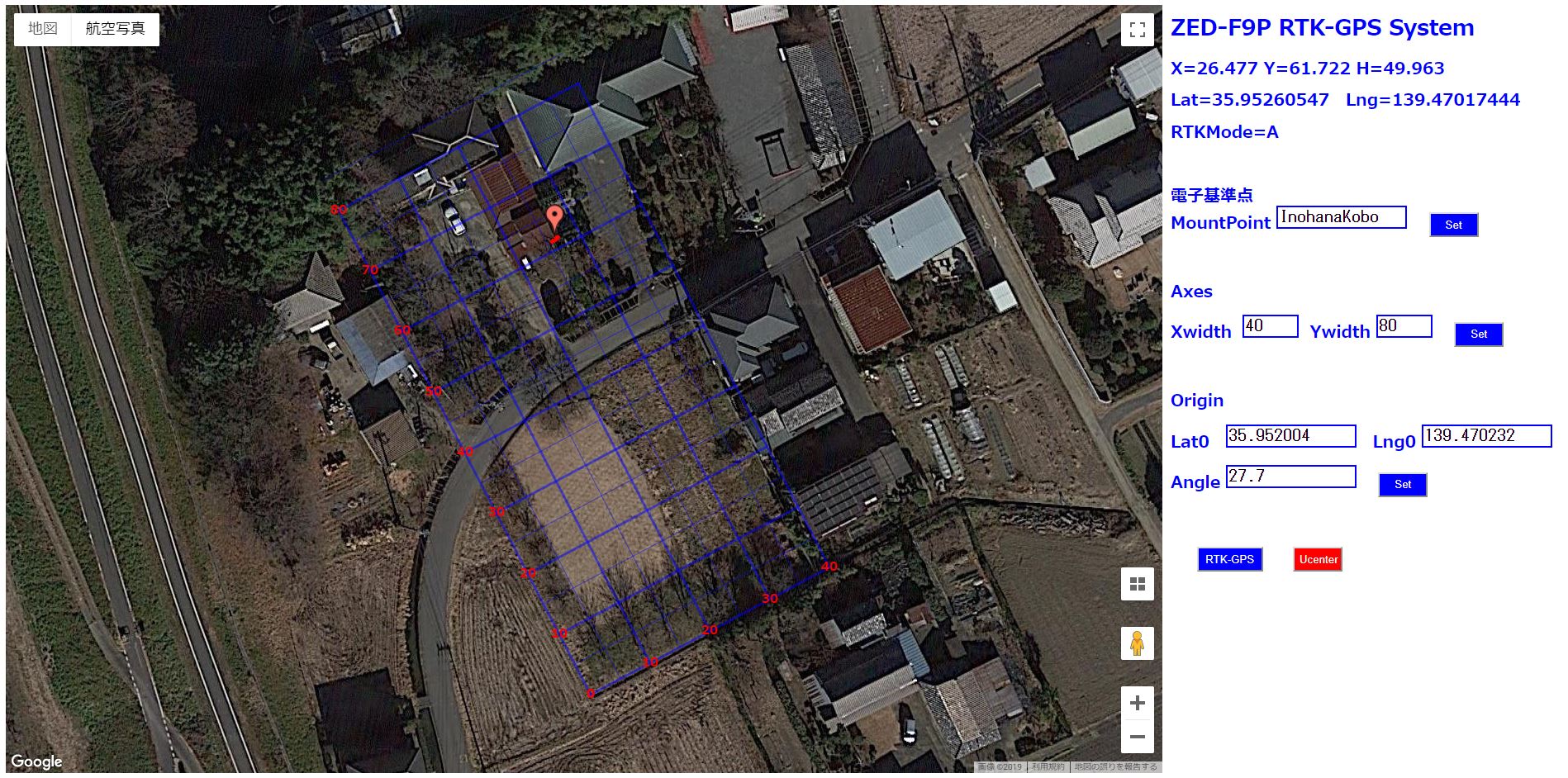
ZED-F9PのRTK-GPS Systemを製作途上だが、試行錯誤の段階ではu-centerに接続してF9Pの設定を変更したくなることもある。PCとUSBケーブルで接続すれば可能だが、遠隔では不可能で、極めて面倒なので、ワンタッチ(クリック)でリモート接続を可能とした。str2strの双方向オプション -bで実現している。使えば使うほど、良く出来ていると感動する。結果は以下で、u-centerからは、Network connection ・TCP接続が可能となる。また、この状態ではRTKNAVIからも、同時にTCP接続が出来、F9P内蔵のRTKエンジンでは無く、u-centerに接続しF9Pをいじりながら、RTKNAVIによるRTKが可能になり、視覚化された状態で、詳細な解析が可能となる。
■2019-10-19
★RTK-GPS UNIT

友人からは、あやしい、と言われた、この見てくれ、、、(近隣の方からは、宇宙人と交信しているのか?、と言われた)。
機能性能、開発効率重視で、デザインは割切っている(言い訳)、、、
ZED-F9PとRaspberryPiZeroでRTK-GPS UNIT(Rover)プロトタイプを製作した。リチウム・イオン・バッテリーを内蔵し、測位結果はWebブラウザで表示するようにしている。電子基準点データは、WiFi (or スマホのテザリング)でRasPiのstr2strでF9PのUART1へ流し込み、RTKの結果は、UART2からRasPi Pythonで受け取り、Webサーバーで配信(現状LAN内)している。

100Kmも離れた、茨木の基準局でも充分なFixが得られ、驚きである(最近、良好なFixをしていた、距離60Kmの※※大学の基準局が停止していて残念)。
善意の基準局用に使っていたF9Pをこちらに転用してしまったので、基準局は、NEO-M8Tで1周波暫定運用している。gnss store(旧csg shop)に追加で発注したので、到着したら2周波に戻す予定(10/22 2周波復活)。
これを担いで、近隣を歩き回った測位軌跡動画は以下。3m程の田舎道だが、cm級精度で、道路の縁を高精度でトレースできている。工房のWiFiルーターから140m程の距離(150ヤード・7番アイアン距離)で、この辺までが、WiFiの限界。
トラクター、田植え機等の自動運転、様々な自律走行ROBOT、簡易測量などに活用出来ると思う。
■2019-09-03
★RasPi監視カメラ

先日作った、ケース(3Dプリンター製)入りRaspberryPiZeroに、GPS・RTK電子基準点処理だけをさせておくのも、仕事が軽すぎるので、監視カメラを組込んだ。ストリーミング動画Webサーバーとして動作しているので、PC,スマホ等のWebブラウザでモニター出来て、結構便利。
■2019-08-14
★ZED-F9P

進行中の開発案件に必要になり、久々にRTK-GPSにトライしている。技術は日進月歩で、今や2周波のRTKエンジン内蔵のデバイス(ZED-F9P)が登場、これを2個入手し、電子基準点とRoverを作成した。RTK Fixの速さ・率の高さは、驚異的。
折角なので、善意の基準局に登録し、運営することにした。strsvr + PCつけっぱなし、と言うのも電力の無駄なので、str2str + RaspberryPi Zero でRTCM3変換(GPS+QZSS+BeiDou)→(長時間動作、1~2時間でFixしなくなるので、中止、F9PのRTCM3に変更、エフェメリス更新に問題?)をして、フルタイム・配信している。半径10Km圏内(他の基準局との実験では60Kmでも、マズマズのFixが得られた)の方は、RTK電子基準点として、是非ご活用下さい。
■2019-1-3
★WebIOPiその2
年末にいじり始めた、WebIOPiを使って、一通りの動作をするアプリを作った。動くだけで、見てくれは気にしていないレベルだが、これでROBOTをWebサイト化しカメラ動画(mjpg)、Statusの表示と操縦が、Webブラウザ経由で可能となった。PC or スマホのWebブラウザ、RasPi htmlとPython、ESP32 C++が連携動作しているが、利便性はマズマズだと思う。
■2019-1-1
{kind=link}
★ページ更新!
試行錯誤の日々のページが、長~くなってしまったので、新年を機にリニューアルしました!
過去版へのリンクは、左のメニューへ移動しました。